Выдерживание маршрута движения с помощью гирополукомпаса.
Вождение машины по гирополукомпасу осуществляют в таком же порядке, как и движение по азимутам. Для чего предварительно подготавливают необходимые данные. По карте намечают маршрут, минуя препятствия, выбирают и соединяют прямыми линиями ориентиры на поворотах, определяют и подписывают на карте расстояния между ними и магнитные азимуты (если начальное ориентирование производится по магнитному азимуту) илидирекционные углы. Если начальное ориентирование производится по дирекционному углу.
В исходной точке, где произведено начальное ориентирование, на шкале гирополукомпаса устанавливают магнитный азимут (или дирекционный угол) продольной оси машины и разарретируют гирополукомпас. Затем машину поворачивают так, чтобы против индекса шкалы прибора установился отсчет, соответствующий магнитному азимуту (или дирекционному углу) направления движения.
Установив машину в нужном направлении, начинают движение и ведут машину так, чтобы на протяжении всего данного участка маршрута гирополукомпас сохранял установленный отсчет. Пройдя нужное расстояние, определяемое по спидометру, находят поворотный ориентир. Поворачивают машину в направлении второго ориентира и продолжают движение.
Строго прямолинейное вождение машины на местности затруднено, так как неизбежны толчки, крен машины и объезд мелких препятствий. Объезд значительных препятствий должен быть предусмотрен заранее при подготовке карты. Все это вызывает почти непрерывное колебание отсчетов по шкале. Однако необходимо стремиться к тому, чтобы колебания отсчетов были примерно симметричны относительно требуемого курса.
При ориентировании с помощью гирополукомпаса, так же как и при ориентировании на машине, не оборудованной гирополукомпасом, следует по пройденному расстоянию мысленно фиксировать на карте продвижение по маршруту.
Применение.
В связи с длительным использованием гирокомпаса необходимо, чтобы его высокая точность оставалась неизменной в течение многих недель и даже месяцев. Поэтому он конструируется и изготавливается с соблюдением жестких требований по точности, а в процессе эксплуатации подлежит тщательному периодическому обслуживанию. Обычно гирокомпас применяется как опорное навигационное устройство в судовых рулевых системах с ручным или автоматическим управлением, а также при решении различных задач иного рода, например, для определения точного направления при наводке орудия боевого корабля. Морской гирокомпас, как правило, очень тяжел; в некоторых конструкциях вес гироскопического ротора превышает 25 кг. Для нормальной работы гирокомпаса необходимо устойчивое основание, не испытывающее ускорений и фиксированное относительно земной поверхности, причем скорость его перемещения должна быть пренебрежимо мала по сравнению со скоростью суточного вращения Земли на данной широте. Эти условия не соблюдаются на самолете, поэтому применение гирокомпаса ограничено морскими судами.
Точность выдерживания маршрута при движении с помощью гирополукомпаса.
Точность выдерживания маршрута на машине с гирополукомпасом зависит от многих факторов. Основные из них:
Уход главной оси гироскопа. Погрешности начального ориентирования машины и определения по карте дирекционных углов (магнитных азимутов) и расстояний. Недостаточно тщательное удержание требуемого отсчета против индекса прибора при вождении машины. Погрешность определения расстояний спидометром.
Наиболее точно (со средней ошибкой до 2% пройденного расстояния) можно выдерживать требуемое направление при начальном ориентировании машины по ориентиру и при условии умелого вождения машины. Установленный отсчет по шкале не должен отходить от индекса более чем на два деления. При исходном ориентировании машины с помощью компаса или по линии местности с помощью карты среднее отклонение от маршрута может составлять около 5% пройденного пути.
По материалам книги Справочник по военной топографии.А. М. Говорухин, А. М. Куприн, А. Н. Коваленко, М. В. Гамезо.
Гирополукомпас, устройство, начальное ориентирование по ориентиру, магнитному азимуту, дирекционному углу, линии местности, выдерживание маршрута с помощью гирополукомпаса.
Основной элемент гирополукомпаса — гироскоп. Его главная ось вместе со шкалой прибора сохраняет неизменное направление относительно сторон горизонта. Указатель, по которому фиксируется отсчет по шкале, жестко связан с машиной. При повороте машины отсчет по шкале изменяется на соответствующий угол.
Выдерживание направлениядвижения по гирополукомпасу осуществляется путем наблюдения за положением шкалы относительно индекса. При прямолинейном движении машины отсчет по шкале сохраняется. Изменение отсчета показывает, что машина отклонилась от заданного направления. Для восстановления прежнего направления движения машину необходимо развернуть так, чтобы против индекса установился прежний отсчет.
Вождение машины по гирополукомпасу чаще всего осуществляют при преодолении рек под водой, при действиях ночью, в туман, метель и в других случаях ограниченной видимости. Гирополукомпас целесообразно применять также при выдерживании маршрута на местности, беднойориентирами или подвергшейся значительным изменениям. Когда ориентирование по карте путем ее визуального сличения с местностью затруднено.
Гирополукомпас включают и выключают только в неподвижной машине в определенной последовательности. Вначале необходимо убедиться, что гирополукомпас заарретирован (рукоятка арретира должна находиться в положении от себя), и проверитьнапряжение бортовой сети. Оно должно быть не менее 24 В. Затем переключатель питания прибора поставить в положение ВКЛЮЧЕНО.
Через 5 минут с момента включения плавным поворотом рукоятки арретира установить на шкале требуемый угол и разарретировать гирополукомпас, оттянув на себя рукоятку до щелчка. Порядок выключения гирополукомпаса. Прибор заарретировать переводом рукоятки в положение от себя, а затем выключить питание.
История
Первый, пока не практичный, Форма гирокомпаса была запатентована в 1885 году Маринусом Герардусом ван ден Босом. Полезный гирокомпас был изобретен в 1906 году в Германии. Герман Аншютц-Кемпфе, а после успешных испытаний в 1908 году получил широкое распространение в Императорском флоте Германии. Аншютц-Кемпфе основала компанию Anschütz & Co. в Киль, массовое производство гирокомпасов; сегодня компания Raytheon Anschütz GmbH. Гирокомпас был важным изобретением для морской навигации, потому что он позволял точно определять местоположение судна в любое время, независимо от его движения, погоды и количества стали, использованной при постройке корабля.
В Соединенных Штатах, Элмер Амброуз Сперри произвел работоспособную систему гирокомпаса (1908: патент № 1,242,065) и основал Компания Sperry Gyroscope. Аппарат был принят на вооружение ВМС США (1911 г.), и сыграл важную роль в Первой мировой войне. Военно-морской флот также начал использовать «Металлический Майк» Сперри: первую систему рулевого управления автопилотом, управляемую гироскопом. В последующие десятилетия эти и другие устройства Сперри были приняты на вооружение пароходами, такими как RMS Queen Mary, самолеты и военные корабли времен Второй мировой войны. После его смерти в 1930 году флот назвал USS Сперри после него.
Между тем, в 1913 году К. Плат (гамбургский производитель навигационного оборудования, включая секстанты и магнитные компасы) из Гамбурга разработал первый гирокомпас для установки на коммерческое судно. К. Плат продал много гирокомпасов школе навигации Weems в Аннаполисе, штат Мэриленд, и вскоре основатели каждой организации сформировали альянс и стали Weems & Plath.
Гироскоп Дюмулена-Кребса 1889 года
В 1923 г. Макс Шулер опубликовал свою статью, содержащую его наблюдение, что если гирокомпас обладал Тюнинг Schuler таким образом, чтобы у него был период колебаний 84,4 минуты (что является периодом обращения условного спутника, вращающегося вокруг Земли на уровне моря), тогда его можно было бы сделать нечувствительным к боковому движению и сохранить стабильность направления.
Ошибки
Гирокомпас подвержен определенным ошибкам. К ним относятся ошибки парения, когда быстрые изменения курса, скорости и широты вызывают отклонение до того, как гироскоп сможет настроить себя. На большинстве современных судов GPS или другие навигационные средства подают данные в гирокомпас, позволяя небольшому компьютеру вносить поправки. В качестве альтернативы конструкция, основанная на (включая триаду из волоконно-оптических гироскопов, кольцевых лазерных гироскопов или гироскопов с полусферическим резонатором и триада акселерометров) устранит эти ошибки, поскольку они не зависят от механических частей для определения скорости вращения.
Что такое гирокомпас?
Гирокомпас – это приспособление, основой которого стал гироскоп. Представляет собой предмет, изготовленный из плотного материала. Чаще всего он металлический и легко вращается вокруг оси, а также характеризуется способностью поддерживать это движение. Прибор такого типа, предназначенный для использования на море, содержит в основании гиросферу. Она представлена полым шаром. Внутри расположены вращающиеся гироскопы, которые нуждаются в электропитании. Даже в условиях кратковременного влияния на гирокомпас какой-то силы он всё равно не отклоняется от заданного направления в пространстве.
Операция
А гироскоп, не путать с гирокомпасом, это прялка, установленная на подвесы так что его ось может свободно ориентироваться как угодно. Когда он раскручивается до скорости с его осью, указывающей в каком-либо направлении, из-за закона сохранения угловой момент, такое колесо обычно будет сохранять свою первоначальную ориентацию в фиксированной точке в космическое пространство (не в фиксированную точку на Земле). Поскольку наша планета вращается, стационарному наблюдателю на Земле кажется, что ось гироскопа совершает полный оборот каждые 24 часа. Такой вращающийся гироскоп используется в некоторых случаях для навигации, например на самолетах, где он известен как индикатор курса или гироскоп, но обычно не может использоваться для длительного морского плавания. Важнейший дополнительный ингредиент, необходимый для превращения гироскопа в гирокомпас, чтобы он автоматически перемещался на истинный север, это некий механизм, который приводит к приложение крутящего момента если ось компаса не указывает на север.
Один метод использует трение для приложения необходимого крутящего момента: гироскоп в гирокомпасе не может полностью переориентировать себя; если, например, устройство, подключенное к оси, погружено в вязкую жидкость, эта жидкость будет сопротивляться переориентации оси. Эта сила трения, вызванная жидкостью, приводит к крутящий момент воздействуя на ось, заставляя ось поворачиваться в направлении, ортогональном крутящему моменту (то есть прецессия ) вдоль линия долготы. Как только ось будет направлена к небесному полюсу, она будет казаться неподвижной и больше не будет испытывать сил трения. Это связано с тем, что истинный север (или истинный юг) — единственное направление, в котором гироскоп может оставаться на поверхности земли и его не нужно менять. Эта ориентация оси считается точкой минимума потенциальная энергия.
Другой, более практичный метод — использовать грузы, чтобы заставить ось компаса оставаться в горизонтальном положении (перпендикулярно направлению центра Земли), но в остальном позволять ему свободно вращаться в горизонтальной плоскости. В этом случае сила тяжести создаст крутящий момент, заставляющий ось компаса повернуться к истинному северу. Поскольку веса будут ограничивать ось компаса горизонтальной по отношению к поверхности Земли, ось никогда не может выровняться с осью Земли (кроме экватора) и должна перестраиваться по мере вращения Земли. Но по отношению к поверхности Земли компас будет казаться неподвижным и направленным вдоль поверхности Земли к истинному Северному полюсу.
Поскольку функция поиска севера гирокомпаса зависит от вращения вокруг оси Земли, которое вызывает , он не будет правильно ориентироваться на истинный север, если он очень быстро перемещается в направлении с востока на запад, тем самым сводя на нет вращение Земли. Однако самолеты обычно используют указатели курса или гироскопы направления, которые не являются гирокомпасами и не ориентируются на север через прецессию, а периодически вручную выравниваются по магнитному северу.
Лазерный гироскоп − до сих пор на высоте
Избавиться от перечисленных слабых мест механики удалось в гироскопах следующего поколения − лазерных. В основе работы лазерного гироскопа – эффект Саньяка, открытый еще в 1913 году. Его суть заключается в том, что время прохождения светового луча по замкнутому контуру зависит от того, покоится или вращается данный контур, а также от направления его вращения. Применить этот эффект в гироскопии удалось только с появлением лазеров.
Первые работы по созданию лазерного гироскопа были начаты практически одновременно в США и СССР. В 1962 году американские ученые В. Мацек и Д. Девис создали и запустили первый макетный образец лазерного гироскопа на базе кольцевого газового He-Ne-лазера. В середине 1963 года аналогичный результат был достигнут советскими учеными Л.Н. Курбатовым (НИИПФ) и В.Н. Курятовым (НИИ «Полюс» им. М.Ф. Стельмаха, сегодня входит в холдинг «Швабе» Ростеха).
 Бесплатформенная навигационная система БИНС-СП-1 с лазерным гироскопом
Бесплатформенная навигационная система БИНС-СП-1 с лазерным гироскопом
 Бесплатформенная навигационная система БИНС-СП-1 с лазерным гироскопом
Бесплатформенная навигационная система БИНС-СП-1 с лазерным гироскопомВпоследствии наиболее значимые разработки лазерных гироскопов были организованы в НИИ «Полюс» под руководством его основателя М.Ф. Стельмаха, а начиная с 1969 года запущено промышленное производство и поставки серийных образцов.
Сегодня применяются лазерные гироскопы трех основных типов – вибрационный, фарадеевский и зеемановский. У первого частотная подставка основана на механическом реальном вращении гироскопа путем угловых вибраций, у второго и третьего – на искусственном, электрически управляемом расщеплении частот встречных волн в гироскопе. Лазерные гироскопы используются в составе инерциальных навигационных систем, позволяющих определять местоположение самолета без опоры на внешние источники информации.
Помимо НИИ «Полюс» им. М.Ф. Стельмаха на сегодняшний день масштабными производителями лазерных гироскопов являются Раменский приборостроительный завод и Тамбовский завод «Электроприбор», входящие в «Концерн Радиоэлектронные технологии». Их гироскопы применяются в навигационных устройствах, которые устанавливаются на десятки моделей российских самолетов и вертолетов. Несмотря на общую тенденцию к миниатюризации техники и на совершенствование гироскопов на основе микроэлектромеханических систем (МЭМС-технологии), лазерные гироскопы в силу своей высокой точности продолжают доминировать на рынке навигационных устройств.
Устройство лазерного гироскопа. Частотные характеристики.
Лазерный гироскопквантовый гироскопоптического резонатораволоконно-оптического гироскопаРис. 1. Принципиальная схема лазерного гироскопа: Зt-З3 — зеркала; А — активная среда; З4, З5 — зеркала смесителя встречзых волн (З6 — полупрозрачное); Н— невзаимный элемент; Ф — фотодетектор; П — блок питания; С — система стабилизации параметров лазера; И — система обработки информации.сS, LLmKSL-25141233455К-6K5= 2S/LЗатягивание частоты)R-3невзаимных элементовФарадея эффектаРис. 2. Частотные характеристики лазерного гироскопа: 1 — идеальная ( ), 2, 3 — теоретические [= ], 4 — область реальной характеристики.2022-4-2-3гироскопами:
Устройство прибора
Строение гирокомпаса достаточно сложно, поэтому здесь рассмотрим лишь его основные компоненты. Например, армейский гирокомпас состоит из:
- Гироскопической системы маятникового типа. Собственно, это и есть гироскоп со смещенным центром тяжести.
- Угломерной части. Она предназначена для отсчетов, снятия показаний и измерения горизонтальных углов.
- Штатива. Он служит ля установки компаса на местности.
- Блока управления. Этот блок служит для переключения между режимами гирокомпаса.
- Блока питания. Электропитание позволяет разогнать гироскоп и служит для функционального контроля во время работы.
Строение других гирокомпасов может частично отличаться от строения армейского варианта, но неотъемлемой частью абсолютно любого из вариантов является гироскопическая система. Из-за массивности и больших размеров её вся конструкция компаса оказывается очень большой, и потому применять его в качестве «карманного» средства навигации не получается.
https://youtube.com/watch?v=iYzuZ4qi5Zc
Операция
А гироскоп, не путать с гирокомпасом, это прялка, установленная на подвесы так что его ось может свободно ориентироваться как угодно. Когда он раскручивается до скорости с его осью, указывающей в каком-либо направлении, из-за закона сохранения угловой момент, такое колесо обычно будет сохранять свою первоначальную ориентацию в фиксированной точке в космическое пространство (не в фиксированную точку на Земле). Поскольку наша планета вращается, стационарному наблюдателю на Земле кажется, что ось гироскопа совершает полный оборот каждые 24 часа. Такой вращающийся гироскоп используется в некоторых случаях для навигации, например на самолетах, где он известен как индикатор курса или гироскоп, но обычно не может использоваться для длительного морского плавания. Важнейший дополнительный ингредиент, необходимый для превращения гироскопа в гирокомпас, чтобы он автоматически перемещался на истинный север, это некий механизм, который приводит к приложение крутящего момента если ось компаса не указывает на север.
Один метод использует трение для приложения необходимого крутящего момента: гироскоп в гирокомпасе не может полностью переориентировать себя; если, например, устройство, подключенное к оси, погружено в вязкую жидкость, эта жидкость будет сопротивляться переориентации оси. Эта сила трения, вызванная жидкостью, приводит к крутящий момент воздействуя на ось, заставляя ось поворачиваться в направлении, ортогональном крутящему моменту (то есть прецессия ) вдоль линия долготы. Как только ось будет направлена к небесному полюсу, она будет казаться неподвижной и больше не будет испытывать сил трения. Это связано с тем, что истинный север (или истинный юг) — единственное направление, в котором гироскоп может оставаться на поверхности земли и его не нужно менять. Эта ориентация оси считается точкой минимума потенциальная энергия.
Другой, более практичный метод — использовать грузы, чтобы заставить ось компаса оставаться в горизонтальном положении (перпендикулярно направлению центра Земли), но в остальном позволять ему свободно вращаться в горизонтальной плоскости. В этом случае сила тяжести создаст крутящий момент, заставляющий ось компаса повернуться к истинному северу. Поскольку веса будут ограничивать ось компаса горизонтальной по отношению к поверхности Земли, ось никогда не может выровняться с осью Земли (кроме экватора) и должна перестраиваться по мере вращения Земли. Но по отношению к поверхности Земли компас будет казаться неподвижным и направленным вдоль поверхности Земли к истинному Северному полюсу.
Поскольку функция поиска севера гирокомпаса зависит от вращения вокруг оси Земли, которое вызывает , он не будет правильно ориентироваться на истинный север, если он очень быстро перемещается в направлении с востока на запад, тем самым сводя на нет вращение Земли. Однако самолеты обычно используют указатели курса или гироскопы направления, которые не являются гирокомпасами и не ориентируются на север через прецессию, а периодически вручную выравниваются по магнитному северу.
Отклонения гирокомпаса
При прецессионном движении гироскопа в неуравновешенном состоянии под действием силы тяжести отклонение от горизонтальной оси остается постоянным.
Прецессия гирокомпаса происходит из-за того, что ось вращения гироскопа, первоначально горизонтальная при запуске устройства, смещалась от горизонтали вслед за вращением Земли, создавая обратный момент (угловое ускорение), пропорциональный отклонению. . Но гироскоп стремится сохранить свое горизонтальное отклонение в этой прецессии, и в первом порядке это горизонтальное отклонение увеличивается пропорционально времени (с вращением Земли) и синусу угла между осью и плоскостью меридиана. Когда гирокомпас выравнивается по меридиану, эта разница проходит через максимум; поэтому обратный крутящий момент также является максимальным в этой точке и продолжает вращать гирокомпас за пределы точки равновесия, затем горизонтальное отклонение постепенно уменьшается. Качественно представление этого движения в фазовом пространстве показывает, что оно периодическое, если не затухает. Возникающие таким образом медленные колебания зависят от конструкции устройства и обычно составляют порядка часа (84,4 минуты, см
Ниже). Поэтому очень важно гасить этот режим колебаний
Если коэффициент демпфирования установлен так, чтобы придать колебаниям критическую скорость, время демпфирования приблизительно равно периоду для малых отклонений.
В дополнение к этим колебаниям, юстировка гирокомпаса должна подвергаться двум поправкам: одна из-за широты судна, а другая чисто геометрическая из-за его скорости.
Первая поправка, в зависимости от широты, исходит из того факта, что в меридиональной плоскости после вращения Земли по-прежнему необходимо вращать ось гироскопа, чтобы удерживать его в этой плоскости (кроме области вблизи экватора). В своей плоскости вращения гироскоп видит компонент, пропорциональный, которому он должен следовать, сохраняя пропорциональное горизонтальное отклонение, которое, следовательно, соответствует компенсирующему отклонению (in ) по отношению к плоскости меридиана. Таким образом, в целом эта разница пропорциональна ; коэффициент пропорциональности зависит от возвратной силы противовеса и, следовательно, от конструкции устройства. Это отклонение можно преодолеть, сместив противовес для уравновешивания момента, необходимого для данной широты, но эта настройка сама зависит от широты.
λ{\ displaystyle \ lambda}Ω→{\ displaystyle {\ vec {\ Omega}}}Ω.грех(λ){\ Displaystyle \ Омега. \ грех (\ лямбда)}1противоs(λ){\ Displaystyle 1 / соз (\ лямбда)}загар(λ){\ Displaystyle \ загар (\ лямбда)}
С другой стороны, поскольку работа гироскопа в основном зависит от его вращения на Земле, он не будет работать правильно, если корабль, на котором он установлен, движется быстро. Движение гироскопа по меридиану (проецируется внутрь ) вызывает геометрическое отклонение, потому что комбинация этого движения и движения, вызванного вращением Земли (in ), представляет собой новое вращение, ось которого не обязательно сливается с осью вращения Земля. Гироскоп больше указывает не точно на север, а в направлении, которое является результатом комбинации двух вращений, в зависимости от широты (cos) на поверхности Земли и скорости, с которой перемещается гироскоп. Отсюда вторая коррекция формы . Скорость по меридиану 20 км / ч вызывает отклонение всего на 0,5 °. На скорости 150 км / ч это отклонение увеличивается до 5 °.
V.грех(α){\ Displaystyle V. \ грех (\ альфа)}рω.потому что(λ){\ Displaystyle Р \ омега. \ соз (\ лямбда)}V.грех(α)(рω.потому что(λ)){\ Displaystyle V. \ грех (\ альфа) / (р \ омега. \ соз (\ лямбда))}
Третий теоретический источник баллистического отклонения — изменение скорости или направления корабля. Эти изменения соответствуют ускорению, которое вызывает отклонение гироскопа от горизонтали, а возвращающая сила затем стремится заставить его отклониться от плоскости меридиана. Этот эффект компенсируется предоставлением гирокомпасу значительного периода колебаний. В 1923 году Макс Шулер опубликовал статью, показывающую, что если гирокомпас подтвердит «соглашение Шулера», имея период колебаний 84,4 минуты (который является периодом обращения теоретического спутника, вращающегося вокруг Земли на уровне моря), он может оказаться нечувствительным. боковым движениям и сохранению курсовой устойчивости. В этой конструкции угловое отклонение, вызванное баллистическим ускорением, соответствует разнице в геометрическом отклонении между двумя рабочими режимами, и поэтому геометрическая поправка, применимая к новому рабочему режиму, может быть применена немедленно.
Механический гироскоп
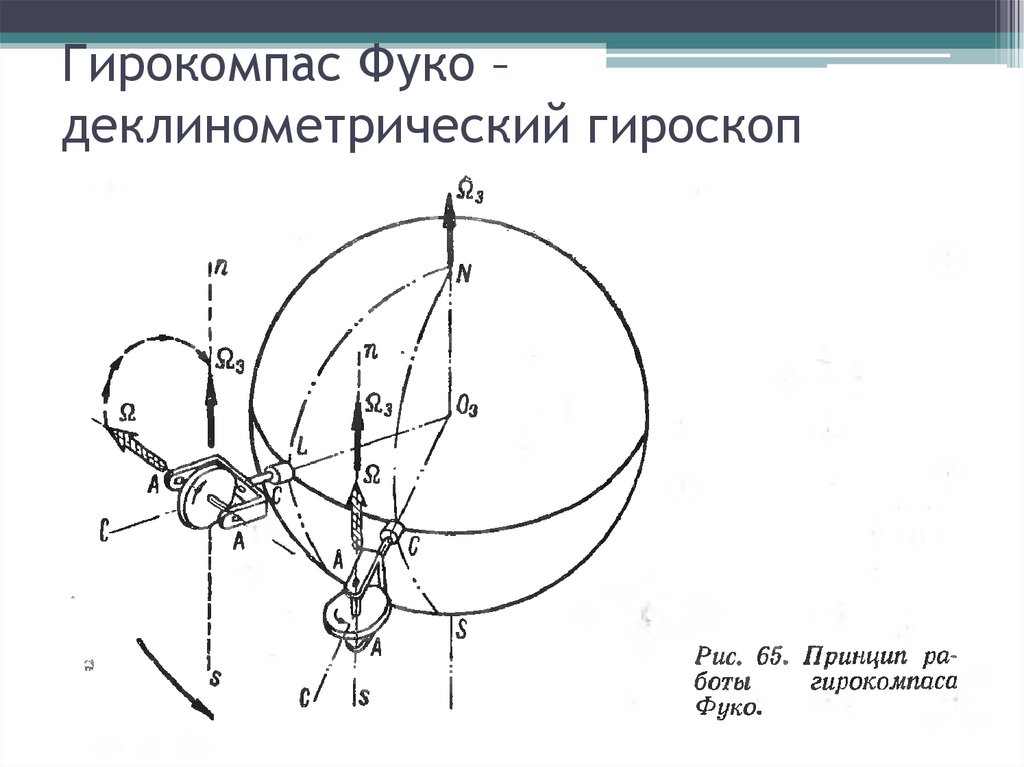
В 1852 году французский физик, механик и астроном, будущий член Парижской академии наук и член-корреспондент Петербургской академии наук, Жан Бернар Леон Фуко описал созданный им прибор, который он назвал гироскопом (от греч. gyros — «круг», gyrou — «кружусь», «вращаюсь» и scopeo — «смотрю», «наблюдаю»). Как показал Фуко, с его помощью можно автономно определять направление движения объекта и его скорость.
Как уже было сказано, изобретение гироскопа стало в известном смысле результатом изучения поведения древнейшей детской игрушки — волчка. Если раскрутить волчок относительно оси симметрии, то выясняется, что он оказывает энергичное сопротивление попытке изменить положение оси вращения, его ось вращения устойчиво сохраняет свое положение при наклонах основания или толчках. Именно в силу этого свойства вращающийся волчок не падает, а его ось описывает конус вокруг вертикали; это движение называется регулярной прецессией тяжелого твердого тела. Можно показать, что ось волчка в конце концов устанавливается параллельно земной оси. Этим и объясняется применение «волчка» в гироскопах.
В гироскопе Фуко ротор (волчок) был установлен в карданов подвес с вертикальной осью наружной рамки. Фуко указал на три возможности использования гироскопа:
-
если быстровращающийся ротор имеет три степени свободы, то его ось вращения сохраняет неизменную ориентацию в инерциальном пространстве, что позволяет с помощью такого прибора наблюдать вращение Земли;
-
если внутреннюю рамку жестко связать с наружной так, чтобы ось ротора могла поворачиваться лишь в горизонтальной плоскости, то эта ось стремится установиться в плоскость меридиана;
-
если наружную рамку жестко связать с корпусом, а внутренней рамке дать свободу вращения относительно ее оси и установить ось ротора в плоскость меридиана, то она стремится установиться параллельно оси вращения Земли.
Гироскопы за последние сто пятьдесят лет прошли в своем развитии четыре больших этапа принципиальных преобразований, каждый из которых непосредственно связан с историей развития физики и технологий
Свободно вращающийся гироскоп под воздействием внешней силы отклоняется не внаправлении этой силы, а перпендикулярно ей — прецессирует. В авиации, например, это свойство позволяет судить о движении самолета в пространстве в отсутствие ориентиров. Прецессия возникает, например, если крыло самолета, в котором установлен гироскоп, начинает крениться
Тогда пилот на приборной доске видит угол поперечного крена, что очень важно, если нет никаких ориентиров. Кроме того, он видит продольный крен, от носа до хвоста
Если гироскоп связан с акселерометрами (приборами, измеряющими скорость самолета), то может функционировать как автопилот, то есть автоматически поддерживать самолет на курсе.
Ошибки
Гирокомпас подвержен определенным ошибкам. К ним относятся ошибки пропаривания, когда быстрые изменения курса, скорости и широта причина отклонение прежде, чем гироскоп сможет настроить себя. На большинстве современных кораблей GPS или другие навигационные средства подают данные в гирокомпас, позволяя небольшому компьютеру вносить поправку. (включая триаду волоконно-оптические гироскопы, кольцевые лазерные гироскопы или полусферические резонаторные гироскопы и триада акселерометров) устранят эти ошибки, поскольку они не зависят от механических частей для определения скорости вращения.
История
Первый, пока не практичный, Форма гирокомпаса была запатентована в 1885 году Маринусом Герардусом ван ден Босом. Полезный гирокомпас был изобретен в 1906 году в Германии. Герман Аншютц-Кемпфе, а после успешных испытаний в 1908 году получил широкое распространение в Императорском флоте Германии. Аншютц-Кемпфе основала компанию Anschütz & Co. в Киль, массовое производство гирокомпасов; сегодня компания Raytheon Anschütz GmbH. Гирокомпас был важным изобретением для морской навигации, потому что он позволял точно определять местоположение судна в любое время, независимо от его движения, погоды и количества стали, использованной при постройке корабля.
В Соединенных Штатах, Элмер Амброуз Сперри произвел работоспособную систему гирокомпаса (1908: патент № 1,242,065) и основал Компания Sperry Gyroscope. Аппарат был принят на вооружение ВМС США (1911 г.), и сыграл важную роль в Первой мировой войне. Военно-морской флот также начал использовать «Металлический Майк» Сперри: первую систему рулевого управления автопилотом, управляемую гироскопом. В последующие десятилетия эти и другие устройства Сперри были приняты на вооружение пароходами, такими как RMS Queen Mary, самолеты и военные корабли времен Второй мировой войны. После его смерти в 1930 году флот назвал USS Сперри после него.
Между тем, в 1913 году К. Плат (гамбургский производитель навигационного оборудования, включая секстанты и магнитные компасы) из Гамбурга разработал первый гирокомпас для установки на коммерческое судно. К. Плат продал много гирокомпасов школе навигации Weems в Аннаполисе, штат Мэриленд, и вскоре основатели каждой организации сформировали альянс и стали Weems & Plath.
Гироскоп Дюмулена-Кребса 1889 года
В 1923 г. Макс Шулер опубликовал свою статью, содержащую его наблюдение, что если гирокомпас обладал Тюнинг Schuler таким образом, чтобы у него был период колебаний 84,4 минуты (что является периодом обращения условного спутника, вращающегося вокруг Земли на уровне моря), тогда его можно было бы сделать нечувствительным к боковому движению и сохранить стабильность направления.