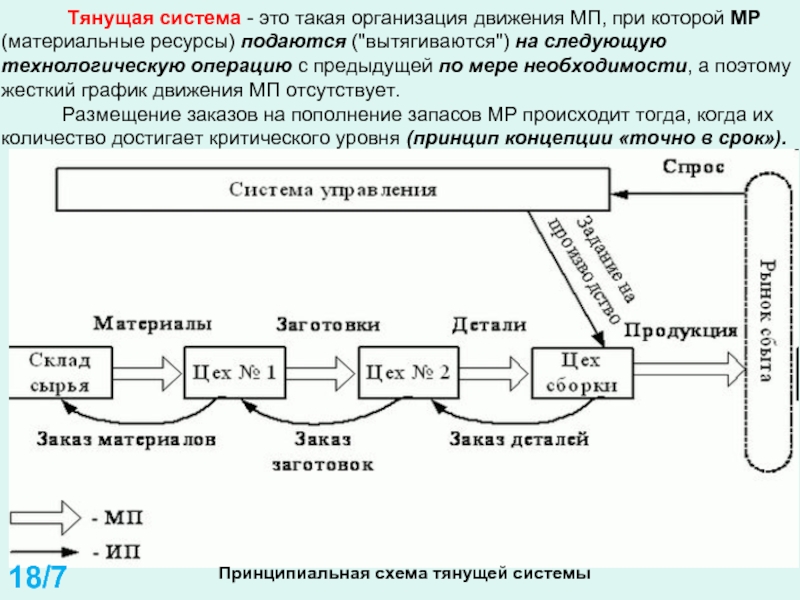
Еще немного прелюдии
Испытания систем, позволяющих подавить GPS-сигналы в помехах, уже проводились, и данная технология достаточно отработана для того, чтобы быть примененной на практике. В 2013 году, например, один из специалистов Техасского университета демонстрировал, как GPS-спуфинг может сбить с курса яхту с новейшим оборудованием. Ну а если вы считаете, что можете запустить нечто прямо в чье-то окно, то сегодня не стоит удивляться, если это нечто вдруг влетит прямо в то окно, из которого отдали приказ о его запуске.
Впрочем, двойное применение системы GPS было заложено еще в самом начале ее развития. Во времена войн США с Ираком официальный представитель министерства обороны США заявил, что американские военные способны подавлять сигналы GPS гражданского диапазона регионально, и от этой возможности отказываться не собираются, а подавление доступа к GPS в невоенном диапазоне в пределах «театра боевых действий» может существенно ослабить возможности вооруженных сил Ирака. Доступ гражданских пользователей во всем мире к высокоточным сигналам GPS, ранее доступным только военным и специальным правительственным службам США, открыл своим указом 1 мая 2000 года президент США Билл Клинтон. До этого момента гражданские сигналы GPS намеренно загрублялись, чтобы снизить точность определения координат (примерно в 5 раз). Гражданские сигналы системы GPS используют так называемый код C/A (coarse/acquisition). Военные используют т.н. «высокоточный» код p (precise code), который передается в более широкой полосе, чем гражданский. Это позволяет поставить гражданскому сигналу узкополосную помеху, тогда как военный будет продолжать функционировать. Постановщики помех могут быть размещены на возвышенных участках местности, на высоких антеннах или на борту специализированных самолетов.
Говорят, что локальное загрубление сигналов GPS уже имело место в ходе боевых действий в Афганистане, чтобы вооруженные приемниками GPS силы Талибана подольше блуждали по горам. А во время иракских событий целая флотилия рыбаков не один день блуждала по Индийскому океану в поисках дороги к дому, удивляясь на свои GPS-приемники. Южнокорейские рыболовные суда в последнее время все чаще раньше времени возвращаются в порт, когда у них пропадает GPS-сигнал. Ответственность возлагают на Северную Корею, которая, предположительно, глушит сигнал, но этого не признает. Сообщалось также, что в 2014 и 2015 годах аналогичная проблема прервала операции Береговой охраны США в двух портах, но компетентные лица не уточняли, в каких именно.
Как бы то ни было, вот вам и еще один вид электронного оружия, о котором давно знают военные, а теперь наслышаны и журналисты. А иногда в роли «оружия» выступает и сам абонентский приемник. Впрочем, сама система или помехи не всегда виноваты. – Однажды молодая девушка из канадской провинции Онтарио едва не погибла, доверившись указаниям GPS-навигатора, который ночью в дождь направил автомобиль к нужному пункту прямо через озеро. К счастью, погрузившись в озеро, девушка успела опустить стекло и выбраться наружу.
Спутниковая навигация
С 1960-х годов навигация все больше перемещается на системы спутниковой навигации. По сути, это гиперболические системы, передатчики которых находятся на орбитах. Чтобы спутники двигались относительно приемника, необходимо учитывать расчет положений спутников, что может быть эффективно выполнено только с помощью компьютера.
Спутниковые навигационные системы отправляют несколько сигналов, которые используются для декодирования положения спутника, расстояния между спутником пользователя и точного времени пользователя. Один сигнал кодирует данные эфемерид спутника, которые используются для точного расчета местоположения спутника в любое время. Космическая погода и другие эффекты вызывают изменение орбиты со временем, поэтому эфемериды необходимо периодически обновлять. Другие сигналы передают время, измеряемое бортовыми атомными часами спутника. Измеряя время прихода сигнала (TOA) по крайней мере от четырех спутников, приемник пользователя может самостоятельно воссоздать точный тактовый сигнал и позволяет осуществлять гиперболическую навигацию.
Спутниковые навигационные системы обеспечивают лучшую точность, чем любая наземная система, доступны почти во всех точках на Земле, могут быть реализованы (на стороне приемника) с умеренной стоимостью и сложностью, с современной электроникой и требуют только несколько десятков спутников для обеспечения всемирного покрытия. В результате этих преимуществ спутниковая навигация привела к тому, что почти все предыдущие системы перестали использоваться. LORAN, Omega, Decca, Consol и многие другие системы исчезли в течение 1990-х и 2000-х годов. Единственные другие системы, которые все еще используются, — это авиационные средства, которые также отключаются для навигации на больших расстояниях, в то время как новые системы дифференциальной GPS развертываются для обеспечения локальной точности, необходимой для слепых посадок.
Определение координат потребителя
Для определения координат потребителя необходимо знать координаты спутников (не менее 4) и дальность от потребителя до каждого видимого спутника. Для того, чтобы потребитель мог определить координаты спутников, излучаемые ими навигационные сигналы моделируются сообщениями о параметрах их движения. В аппаратуре потребителя происходит выделение этих сообщений и определение координат спутников на нужный момент времени.
Координаты и составляющие вектора скорости меняются очень быстро, поэтому сообщения о параметрах движения спутников содержат сведения не об их координатах и составляющих вектора скорости, а информацию о параметрах некоторой модели, аппроксимирующей траекторию движения КА на достаточно большом интервале времени (около 30 минут). Параметры аппроксимирующей модели меняются достаточно медленно, и их можно считать постоянными на интервале аппроксимации.
Параметры аппроксимирующей мо-дели входят в состав навигационных сообщений спутников. В системе GPS используется Кеплеровская модель движения с оскулирующими элементами. В этом случае траектория полёта КА разбивается на участки аппроксимации длительностью в один час. В центре каждого участка задаётся узловой момент времени, значение которого сообщается потребителю навигационной информации. Помимо этого, потребителю сообщают параметры модели оскулирующих элементов на узловой момент времени, а также параметры функций, аппроксимирующих изменения параметров модели оскулирующих элементов во времени как предшествующем узловому элементу, так и следующем за ним.
В аппаратуре потребителя выделяется интервал времени между моментом времени, на который нужно определить положение спутника, и узловым моментом. Затем с помощью аппроксимирующих функций и их параметров, выделенных из навигационного сообщения, вычисляются значения параметров модели оскулирующих элементов на нужный момент времени. На последнем этапе с помощью обычных формул кеплеровской модели определяют координаты и составляющие вектора скорости спутника.
В системе Глонасс для определения точного положения спутника используются дифференциальные модели движения. В этих моделях координаты и составляющие вектора скорости спутника определяются численным интегрированием дифференциальных уравнений движения КА, учитывающих конечное число сил, действующих на КА. Начальные условия интегрирования задаются на узловой момент времени, располагающийся посередине интервала аппроксимации.
Как было сказано выше, для определения координат потребителя необходимо знать координаты спутников (не менее 4) и дальность от потребителя до каждого видимого спутника, которая определяется в навигационном приёмнике с точностью около 1 м. Для удобства рассмотрим простейший «плоский» случай, представленный на рис. 8.
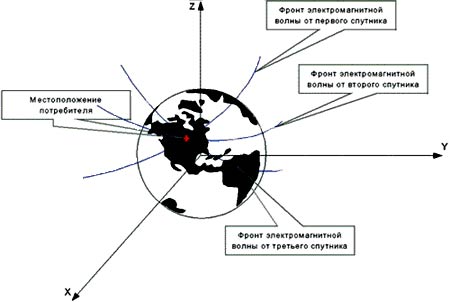 Рисунок 8. Определение координат потребителя
Рисунок 8. Определение координат потребителя
Каждый спутник (рис. ![]() можно представить в виде точечного излучателя. В этом случае фронт электромагнитной волны будет сферическим. Точкой пересечения двух сфер будет та, в которой находится потребитель.
можно представить в виде точечного излучателя. В этом случае фронт электромагнитной волны будет сферическим. Точкой пересечения двух сфер будет та, в которой находится потребитель.
Высота орбит спутников составляет порядок 20000 км. Следовательно, вторую точку пересечения окружностей можно отбросить из-за априорных сведений, так как она находится далеко в космосе.
История создания
Радионавигационные системы играют важную роль в навигации. Они позволяют точно определять положение судна в море независимо от погодных условий и состояния моря. Работа радионавигационных систем основана на измерении разницы расстояний до передающих станций, расположенных на берегу. В каждом методе, используемом для определения разности расстояний, изолиния, соответствующая постоянной разнице, является гиперболой. Поэтому эти радионавигационные системы также называют гиперболическими навигационными системами. На определение местоположения судна с их помощью у судоводителя уходит несколько минут. Современные глобальные РНС охватывают всю площадь земной поверхности и позволяют определять местонахождение судна в любой точке Мирового океана по двум-шести линиям положения.






Запуск в нашей стране в 1957 году первого в истории человечества искусственного спутника Земли открыл широкие перспективы для обеспечения навигации. Полярные орбиты навигационных искусственных спутников Земли (НИСЗ) расположены таким образом, что с корабля, где бы он ни находился, можно было определять его положение не реже одного раза в 2 часа.
Аппаратура НИСЗ состоит из радиопередающих устройств, канала связи с наземными станциями управления, оборудования для стабилизации спутника в космосе, запоминающих и вычислительных устройств. Как только корабль оказывается в зоне «радиовидимости» следующего спутника, бортовое устройство автоматически преобразует сигналы, полученные со спутника. На световом табло в рубке отображаются координаты судна, его курс и скорость, а также время определения местоположения.
Преимуществами спутниковой системы являются практически неограниченная дальность действия, высокая помехозащищенность и высокая точность определения местоположения судна в любых метеорологических условиях.
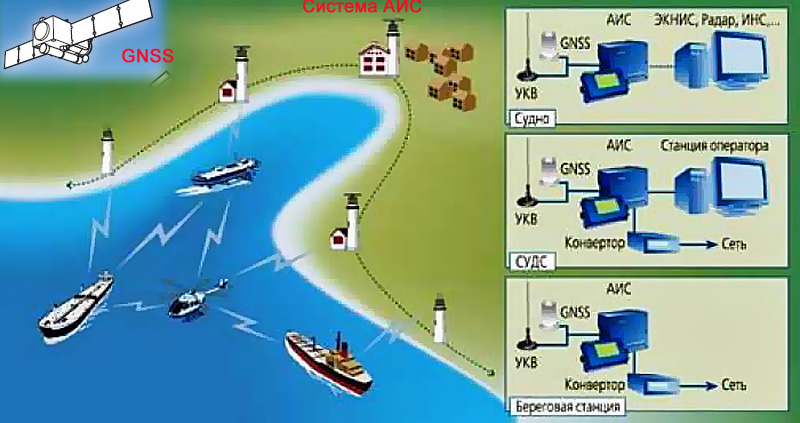
Сетевая радионавигационная спутниковая система (СРНСС) Глонасс
Система Глонасс предназначена для глобальной оперативной навигации приземных подвижных объектов. СРНСС разработана по заказу Министерства Обороны. По своей структуре Глонасс так же, как и GPS, считается системой двойного действия, то есть может использоваться как в военных, так и в гражданских целях.
Система в целом включает в себя три функциональные части (в профессиональной литературе эти части называются сегментами) (рис. 1).
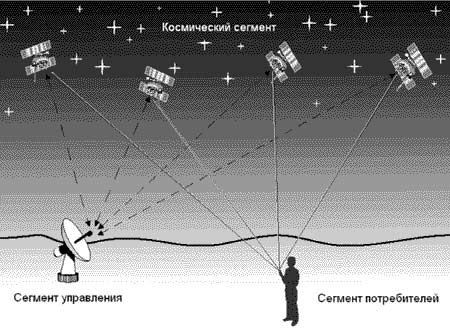 Рисунок 1. Сегменты высокоорбитальных навигационных систем Глонасс и GPS
Рисунок 1. Сегменты высокоорбитальных навигационных систем Глонасс и GPS
- космический сегмент, в который входит орбитальная группировка искусственных спутников Земли (иными словами, навигационных космических аппаратов);
- сегмент управления, наземный комплекс управления (НКУ) орбитальной группировкой космических аппаратов;
- аппаратура пользователей системы.
Из этих трёх частей последняя, аппаратура пользователей, самая многочисленная. Система Глонасс является беззапросной, поэтому количество потребителей системы не имеет значения. Помимо основной функции — навигационных определений, — система позволяет производить высокоточную взаимную синхронизацию стандартов частоты и времени на удалённых наземных объектах и взаимную геодезическую привязку. Кроме того, с её помощью можно производить определение ориентации объекта на основе измерений, производимых от четырёх приёмников сигналов навигационных спутников.
В системе Глонасс в качестве радионавигационной опорной станции используются навигационные космические аппараты (НКА), вращающиеся по круговой геостационарной орбите на высоте ~ 19100 км (рис. 2). Период обращения спутника вокруг Земли равен, в среднем, 11 часов 45 минут. Время эксплуатации спутника — 5 лет, за это время параметры его орбиты не должны отличаться от номинальных значений больше чем на 5%. Сам спутник представляет собой герметический контейнер диаметром 1,35 м и длиной 7,84 м, внутри которого размещается различного рода аппаратура. Питание всех систем производится от солнечных батарей. Общая масса спутника — 1415 кг. В состав бортовой аппаратуры входят: бортовой навигационный передатчик, хронизатор (часы), бортовой управляющий комплекс, система ориентации и стабилизации и так далее.
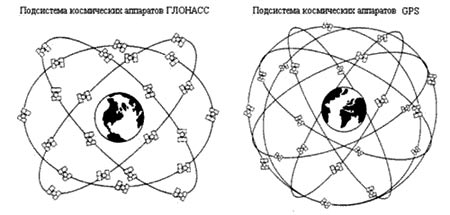 Рисунок 2. Космический сегмент систем ГЛОНАСС и GPS
Рисунок 2. Космический сегмент систем ГЛОНАСС и GPS
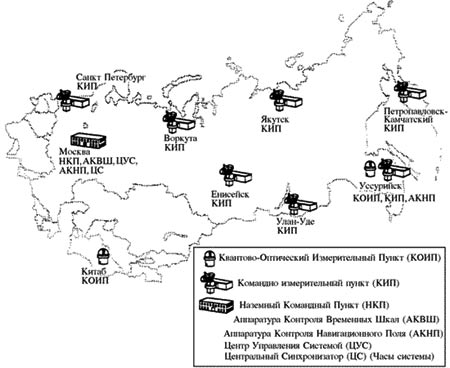 Рисунок 3. Сегмент наземного комплекса управления системы Глонасс
Рисунок 3. Сегмент наземного комплекса управления системы Глонасс
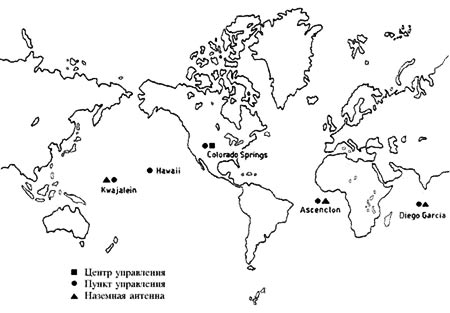 Рисунок 4. Сегмент наземного комплекса управления системы GPS
Рисунок 4. Сегмент наземного комплекса управления системы GPS
Сегмент наземного комплекса управления системы ГЛОНАСС выполняет следующие функции:
- эфемеридное и частотно-временное обеспечение;
- мониторинг радионавигационного поля;
- радиотелеметрический мониторинг НКА;
- командное и программное радиоуправление НКА.
Для синхронизации шкал времени различных спутников с необходимой точностью на борту НКА используются цезиевые стандарты частоты с относительной нестабильностью порядка 10-13. На наземном комплексе управления используется водородный стандарт с относительной нестабильностью 10-14. Кроме того, в состав НКУ входят средства коррекции шкал времени спутников относительно эталонной шкалы с погрешность 3–5 нс.
Наземный сегмент обеспечивает эфемеридное обеспечение спутников. Это означает, что на земле определяются параметры движения спутников и прогнозируются значения этих параметров на заранее определённый промежуток времени. Параметры и их прогноз закладываются в навигационное сообщение, передаваемое спутником наряду с передачей навигационного сигнала. Сюда же входят частотно-временные поправки бортовой шкалы времени спутника относительно системного времени. Измерение и прогноз параметров движения НКА производятся в Баллистическом центре системы по результатам траекторных измерений дальности до спутника и его радиальной скорости.
Сетевая радионавигационная спутниковая система GPS
Американская система GPS по своим функциональным возможностям аналогична отечественной системе Глонасс. Её основное назначение — высокоточное определение координат потребителя, составляющих вектора скорости, и привязка к системной шкале времени. Аналогично отечественной, система GPS разработана для Министерства Обороны США и находится под его управлением. Согласно интерфейсному контрольному документу, основными разработчиками системы являются:
- по космическому сегменту — Rockwell International Space Division, Martin Marietta Astro Space Division;
- по сегменту управления — IBM, Federal System Company;
- по сегменту потребителей — Rockwell International, Collins Avio-nics & Communication Division .
Как и система Глонасс, GPS состоит из космического сегмента, наземного командно-измерительного комплекса и сегмента потребителей.
Как было сказано выше, орбитальная группировка GPS состоит из 28 навигационных космических аппаратов. Все они находятся на круговых орбитах с периодом обращения вокруг Земли, равным 12 часам. Высота орбиты каждого спутника равна ~ 20000 км. НКА системы GPS проходили ряд усовершенствований, которые сказывались на их характеристиках в целом. В табл. 1 приведены краткие характеристики космических аппаратов, используемых в системе.
Таблица 1. Характеристики космических аппаратов, используемых в системе GPS
| Тип НКА | Масса на орбите | Мощность энергоисточников, Вт | Расчётный срок активного существования | Год запуска первого НКА |
| Блок-I | 525 | 440 | — | 1978 |
| Блок-II | 844 | 710 | 5 | 1989 |
| Блок-IIR | 1094 | 1250 | 7,5 | 1997 |
| Блок-IIF | — | — | 14–15 | 2001–2002 |
Таблица 2. Сравнительные характеристики систем ГЛОНАСС и GPS
| Показатель | ГЛОНАСС | GPS |
| Число КА в полной орбитальной группировке | 24 | 24 |
| Число орбитальных плоскостей | 3 | 6 |
| Число КА в каждой плоскости | 8 | 4 |
| Наклонение орбиты | 64,8º | 55º |
| Высота орбиты, км | 19 130 | 20 180 |
| Период обращения спутника | 11 ч. 15 мин. 44 с | 11 ч. 58 мин. 00 с |
| Система координат | ПЗ-90 | WGS-84 |
| Масса навигационного КА, кг | 1450 | 1055 |
| Мощность солнечных батарей, Вт | 1250 | 450 |
| Срок активного существования, лет | 3 | 7,5 |
| Средства вывода КА на орбиту | «Протон-К/ДМ» | Delta 2 |
| Число КА, выводимых за один запуск | 3 | 1 |
| Космодром | Байконур (Казахстан) | Мыс Канаверел (Cape Canaveral) |
| Эталонное время | UTC (SU) | UTC (NO) |
| Метод доступа | FDMA | CDMA |
| Несущая частота:L1L2 | 1598,0625—1604,257/9 L1 | 1575,4260/77 L1 |
| Поляризация | Правосторонняя | Правосторонняя |
| Тип псевдошумовой последовательности | m-последовательность | код Голда |
| Число элементов кода:C/AP | 51151 1000 | 10232,35×1014 |
| Скорость кодирования, Мбит/с:C/AP | 0,5115,11 | 1,02310,23 |
| Уровень внутрисистемных радиопомех, дБ | -48 | -21,6 |
| Структура навигационного сообщения | ||
| Скорость передачи, бит/с | 50 | 50 |
| Вид модуляции | BPSK (Манчестер) | BPSK NRZ |
| Длина суперкадра, мин. | 2,5 (5 кадров) | 12,5 (25 кадров) |
| Длина кадра, с | 30 (15 строк) | 30 (5 строк) |
| Длина строки, с | 2 | 6 |
При проектировании системы в целом и НКА в частности, большое внимание уделяется вопросам автономного функционирования. Так, космические аппараты первого поколения (Блок-I) обеспечивали нормальную работу системы (имеется в виду, без существенных ошибок определения координат) без вмешательства сегмента управления в течение 3–4 дней
В аппаратах Блок-II этот срок был увеличен до 14 дней. В новой модификации НКА Блок-IIR позволяет автономно работать в течение 180 дней без корректировки параметров орбиты с земли, пользуясь лишь автономным комплексом взаимной син-хронизации спутников. Аппараты Блок-IIF предполагается использовать взамен отработавших Блок-IIR.









Loran-C
Когда использование ГНСС стало обрастать рисками, тема создания чего-то альтернативного стала источником длительных обсуждений в APNT-сообществе, в котором пока еще нет общего согласия по нескольким направлениям, гарантирующим надежность, целостность/достоверность и точность (синхронизации или позиционирования). Но в целом общее направление движения уже понятно, и это модернизация системы Loran-C.
Упомянутая выше система Loran в своем развитии прошла несколько стадий развития. В частности, система Loran-C — первоначально была разработана для предоставления военным пользователям радионавигационных служб США с большей степенью покрытия и точности, чем ее предшественник (система Loran-А).
Loran-C была введена в эксплуатацию для гражданского применения в 1957 году. Система использовала радиосигналы от 24 вышек на берегу, управляемые Береговой Охраной США, для позиционирования в море и в воздухе. В дальнейшем она была выбрана для использования в качестве радионавигационной системы гражданским флотом.
Радионавигационная система (РНС) Loran-C (отечественный аналог — «Чайка») относится к разностно-дальномерным РНС с синхронизацией моментов излучения и фазы импульсных сигналов, излучаемых наземными передающими станциями. Станции располагаются цепочками по 3-5 станций, которые осуществляют передачу сигналов на одной и той же частоте с одинаковым для группы периодом повторения, некоторые станции работают одновременно в двух цепях на двух периодах повторения. Каждая цепь РНС состоит из одной ведущей и ведомых станций, работающих с одинаковым, только этой цепи присвоенным периодом повторения серий импульсов.
Этот период повторения служит отличительным признаком цепи. Сигнал станции содержит серию из 8 импульсов, следующих через 1 мс. Ведущая станция дополнительно излучает 9-й импульс. Ведомые станции излучают сигналы с различной задержкой – с определенным запаздыванием относительно сигналов ведущей. Задержка излучения служит отличительным признаком пары.
Для одновременного измерения не менее 2-х разностей расстояний система работает по принципу синхронизированного излучения сигналов (пачек импульсов) ведущей и ведомыми станциями на одной несущей частоте 100 кГц и общей для них частоте повторения. Излучение сигналов станциями производится с таким сдвигом по времени, чтобы в любой точке зоны действия системы обеспечивалось временное разделение сигналов. Для выполнения этого условия необходимо, чтобы любая из ведомых станций начинала излучение своих сигналов после прихода на эту станцию последнего импульса предыдущей (по очереди работы) ведомой станции с учетом задержки этого импульса за счет его многократного отражения от ионосферы. Ведущая станция синхронизирует своими сигналами (как по огибающей импульса, так и по высокочастотному заполнению) работу ведомых станций.
Дальность действия системы Loran-C на суше и на море 1400-1800 и 1800-2000 км соответственно. Мощность излучения передающих станций — 200…1000 кВт. Надежность — 99,7%. Скорость определения местоположения — 10-20 засечек/сек. Погрешность синхронизации станций внутри цепи – 30-50 нс. Точность местоопределения — до 10-50 м в радиусе до 150-200 км.
В целом радионавигационным полем 25 станций Loran-C США и 4 станций Канады в свое время была покрыта территория Северной Америки площадью 9 629091 кв. км.
Десятилетиями Loran-C была стандартной навигационной системой для коммерческого рыболовства, малотоннажного флота и других морских судов, а также для многих самолетов. Систему использовало от 1,2 до 1,5 млн. пользователей. Рабочие зоны цепей Loran-C также расширялись, перекрывая территории США и Канады, почти все побережье Североамериканского континента, Северную Атлантику, Скандинавию и Западную Европу, Северное и Норвежское моря, Атлантическое побережье Франции и Восточную Атлантику, Средиземное море, центральный и северо-западный районы Тихого океана, весь Аравийский полуостров, районы Ближнего и Дальнего Востока, Красного моря, Персидского залива, залив Аден, часть побережья Индии. Общая площадь рабочих зон цепей Loran-C превышала 95 млн.кв. В настоящее на территории Северной Европы зона покрытия системы Loran-С составляет 100 морских миль от передающих станций.
Концепции для новых идей
И GPS, и другие глобальные навигационные спутниковые системы (ГНСС) были вынуждены изменить свою концепцию развития и застраховаться системами, построенными на несколько иных принципах.
Интересно! РНС ГЛОНАСС и GPS – спутники для измерения времени и д дистанции) относятся к системам, использующим в основном псевдодальномерный способ определения, а для решения дополнительных задач (определение скорости) – доплеровский.
Сегодняшняя доступность, высокая точность и низкая стоимость услуг ГНСС для потребителей имеют обратную сторону с точки зрения уязвимости к помехам. Для маломощных сигналов ГНСС (в частности, GPS передает сигнал со спутников, находящихся на расстоянии 20 000 км от поверхности Земли и, естественно, имеющих энергетические ограничения), опасность внешних атак с подделкой сигнала и преднамеренными помехами, а также снижение производительности в некоторых операционных средах.
В США еще в 2004 году указом президента было одобрено создание системы резервного копирования GPS для обеспечения бесперебойного предоставления услуг PNT. Это модернизированная система, основанная на импульсно-фазовой навигационной системе Loran (Long Range Navigation), которая была разработана в США во время Второй мировой войны. Усовершенствованная система Loran будет дополнена цифровой обработкой сигналов.

Изначально комплекс Loran предназначался для навигационного обеспечения ударных сил авиации и флота при решении боевых задач. Высокие тактико-технические характеристики этой системы предопределили ее массовое использование гражданскими потребителями в большинстве стран мира для решения экономических задач. В отличие от систем ГНСС, система Loran передает сигнал с наземных мачт, где потенциальная энергия не ограничена.
Сегодня продолжается обсуждение будущих APNT (Alternative Positioning, Navigation, and Timing). Например, хоть и ясно, что APNT должны быть развернуты в случае отказа GNSS, нет единого мнения о продолжительности и широте охвата с точки зрения выбора регионов, в которых будут работать APNT. В конце концов, уже было несколько серьезных инцидентов, связанных с глушениями GNSS или подделкой сигналов, а использование PNT продолжает улучшаться, создавая новые угрозы. Кроме того, разные заинтересованные стороны имеют в виду разные временные рамки для APNT.
Кроме того, потребуется значительное время для создания, ввода в эксплуатацию или модификации существующей инфраструктуры системы PNT или APNT. С точки зрения потребительских устройств (приемников) или программного обеспечения потребительское навигационное оборудование (NAP) APNT не похоже на NAP GNSS, и здесь нельзя рассчитывать на быстрый рост продаж или регулярные обновления программного обеспечения.


Устройство инерциальной системы
Основа работы ИНС заключается в измерении ускорений летательного аппарата и его угловых скоростей относительно трех осей самолета для того, чтобы исходя из этих данных определить местоположение самолета, его скорость, курс и другие параметры. По результатам анализа объект стабилизируется, и может использоваться автоматическое управление.
Лазерный гироскоп
Для сбора информации о полете в состав ИНС включаются акселерометры, считывающие линейное ускорение, и гироскопы, позволяющие определить углы наклона самолета относительно основных осей: тангаж, рысканье и крен. Точность полученной информации зависит от характеристик этих приборов. Анализом данных занимается компьютер, который затем по определенным навигационным алгоритмам корректирует движение объекта.
ИНС делятся на платформенные и бесплатформенные. Основой для платформенных ИНС служит гиростабилизированная платформа. В бесплатформенных системах акселерометры и гироскопы жестко связаны с корпусом прибора. Функции платформы моделируются математически вычислительной системой. Бесплатформенные системы выгодно отличаются меньшим весом и габаритами, а также возможностью работать при значительных перегрузках.
Преимущества ИНС перед другими навигационными системами заключаются в их полной независимости от внешних источников данных, повышенной защите от помех, высокой информативности и возможности передавать информацию на большой скорости. Отсутствием какого-либо излучения при работе ИНС обеспечивается скрытность объекта, на котором она используется.
Недостатком ИНС можно назвать ошибки, которые накапливаются с течением времени в получаемой от приборов информации. Это могут быть как методические ошибки, так и ошибки, связанные с неверной начальной настройкой оборудования. Для их коррекции создаются интегрированные навигационные системы, где данные, получаемые ИНС, дополняются данными, поступающими от неавтономных систем, например спутниковой навигации. Еще одним относительным минусом ИНС является высокая стоимость входящего в их состав оборудования.