Топология дерева

Как следует из названия, древовидная топология — это сетевая структура, имеющая форму дерева с множеством ветвей. Топологии деревьев иметь корневой узел который связан с другой иерархией узлов. иерархия родитель-потомок где существует только одна взаимная связь между двумя связанными узлами. Как правило, топология дерева должна иметь три уровня иерархии для классификации таким образом. Эта форма топологии используется в глобальных сетях выдержать много разложенных устройств.
преимущества
Основная причина, почему древовидные топологии используется для расширения топологии шины и звезды. В этом иерархическом формате легко добавить больше узлов в сеть, когда ваша организация увеличивается в размерах. Этот формат также хорошо подходит для поиска ошибок и устранения неполадок потому что вы можете систематически проверять проблемы с производительностью по всему дереву.
Недостатки
Наиболее существенным недостатком топологии дерева является корневой узел. В случае сбоя корневого узла все его поддеревья становятся разделенными. Все еще будет частичное соединение в сети среди других устройств, таких как родительский узел неисправного.
Поддерживать сеть тоже не просто, потому что чем больше узлов вы добавляете, тем сложнее становится управлять сеть. Другим недостатком древовидной топологии является количество необходимых кабелей. Кабели необходимы для подключения каждого устройства по всей иерархии, что делает макет более сложным по сравнению с более простой топологией.
Сноски
- ↑ The Times of India Fresh push for Israeli missile system, Feb 9, 2016
- ↑ Pakistan Defence India to Buy Litening-4 ,Spice PGM for Airforce and Spike ATGM for Army, Feb 9, 2016
- Rafael
- RAFAEL Высокоточное оружие Guidance Kit
- NEWSru Индия утвердила закупку двух израильских AWACS за $1,1 млрд 3 марта 2016 г
- ISRAEL AEROSPACE INDUSTRIES
- Tamir Eshel Defense Update Indian Government Clears $1.1 Billion Acquisition of Israeli AEW Planes, Mar 2, 2016
- Elbit Systems
- Elbit Systems of Australia Pty. Ltd. (ELSA)
- Elbit Systems Elbit Systems of Australia Awarded Approximately $30 Million Contract for the Supply of Thermal Weapon Sights, April 19, 2016
- iHLS Elbit Systems of Australia Wins Сontract to Supply Thermal Weapon Sights,April 19, 2016
- Новости ВПК «Элбит системз» поставит ВС Австралии тепловизионные прицелы на сумму 30 млн. долл, 22.04.2016
Арсенал управляемых авиационных бомб люфтваффе
Состоящие на вооружении ВВС Германии многоцелевые платформы «Еврофайтер Тайфун» (Eurofighter) и «Торнадо» (Tornado) при действиях в роли истребителей-бомбардировщиков используют достаточно широкий арсенал управляемых авиационных бомб. Многообразие возможных наземных целей и разнообразная их природа требуют от этой категории эффекторов не только точности, но и достижения заранее установленного воздействия на противника.
По оценкам специалистов, «Еврофайтер» после начавшейся с конца 2017 г. интеграции управляемой авиабомбы GBU-48 уже достиг возможности использования в роли всепогодного истребителя-бомбардировщика (Fighter Bomber All Weather, FBX).
Многоцелевая высокоточная всепогодная бомба с лазерным и
GPS-наведением GBU-48 изготавливается на базе боеприпаса Mk83 (калибр 1000
фунтов, около 454кг) компанией «Райтеон». Боеприпас длительное время
находится в эксплуатации у ВВС США и других стран НАТО. Поставка бундесверу началась
в 2017 г.
 Управляемая авиационная бомба GBU-48
Управляемая авиационная бомба GBU-48
Система состоит из тела бомбы Mk83, изготовленной специально
по немецким требованиям, программируемого бомбового детонатора типа FBM21GER (Fusee de Bombe Modulaire) и улучшенной
системы управления Enhanced PavewayII. Комплекс управления включает аппаратуру
наведения, размещенную в головной части боеприпаса, а также группу рулей в его
хвостовой части.
Всепогодность и точность достигаются GPS-приводом
инерциальной навигационной платформы и лазерной головкой самонаведения.
Настройки детонатора FBM 21GER могут изменяться в воздухе, из кабины самолета,
что дает значительный выигрыш в гибкости и позволяет пилоту адаптировать миссию
под краткосрочное изменение обстановки.
В интересах нанесения
высокоточных ударов по защищенным целям с минимальным побочным эффектом
бундесвер приобрел так называемый «троянский улучшенный разрушитель»
(Trojan Improved Penetrator, TIP).
Боеприпас представляет собой стандартную оболочку бомбы Mk 83, которая имеет
улучшенную проникающую способность. Соответствие размеров TIP корпусу бомбы Mk
83 позволяет использовать систему наведения и управления GBU-48, что
обеспечивает максимально быструю интеграцию активного боеприпаса GBU-48TIP в
систему «Еврофайтер». Поставка
также началась с 2017 г.
 Управляемая авиационная бомба GBU-24
Управляемая авиационная бомба GBU-24
Применение самолета «Торнадо» в роли всепогодного
истребителя-бомбардировщика обеспечивается интеграцией управляемых авиационных
бомб GBU-54 и GBU-24. Эффектор GBU-54 изготавливается концерном
«Боинг» (Boeing) на основе
бомбы МК-82 (калибр 500 фунтов, 226 кг). Двухканальная система наведения
объединяет классический JDAM боеприпас с лазерной головкой самонаведения (ГСН).
Считается, что изделие особенно подходит для оказания
непосредственной авиационной поддержки. Отличительной особенностью GBU-54
является её эффективность против движущихся целей. Под обозначением GBU-38 эффектор
также доступен для применения в виде чистого JDAM боеприпаса без лазерной ГСН.
Планируется его интеграция с «Еврофайтер».
 Истребитель-бомбардировщик «Торнадо» с GBU-24
Истребитель-бомбардировщик «Торнадо» с GBU-24
Для охвата категорий целей, требующих боеприпасов
повышенного могущества, ВВС Германии
имеют на вооружении GBU-24. Как отмечалось выше, боеприпас интегрирован с
истребителем «Торнадо». В основе изделия бомба МК 84 (калибр 2000
фунтов, 907 кг). При этом, речь идет о чистом боеприпасе с лазерным наведением
серии Paveway III. В качестве альтернативы допускает оснащение бомбой с
проникающим сердечником BLU-109. Этот эффектор дает дополнительную способность
пробивать особо сильное бронирование или проникать через очень толстые бетонные
стены.
Таким образом, по оценкам командования ВВС Германии, текущее
разнообразие высокоточных управляемых авиационных бомб позволяет люфтваффе
действовать точно и согласовано в сложных оперативных сценариях. Основой для будущих
закупок должны стать эффекторы средний дальности, которые значительно дополнят
существующий арсенал ВВС, адаптировав его к будущим вызовам.
По материалам журнала «Europäische Sicherheit &Technik»
Подписывайтесь на наш Телеграм-канал и получайте мгновенное сообщение о новых публикациях!
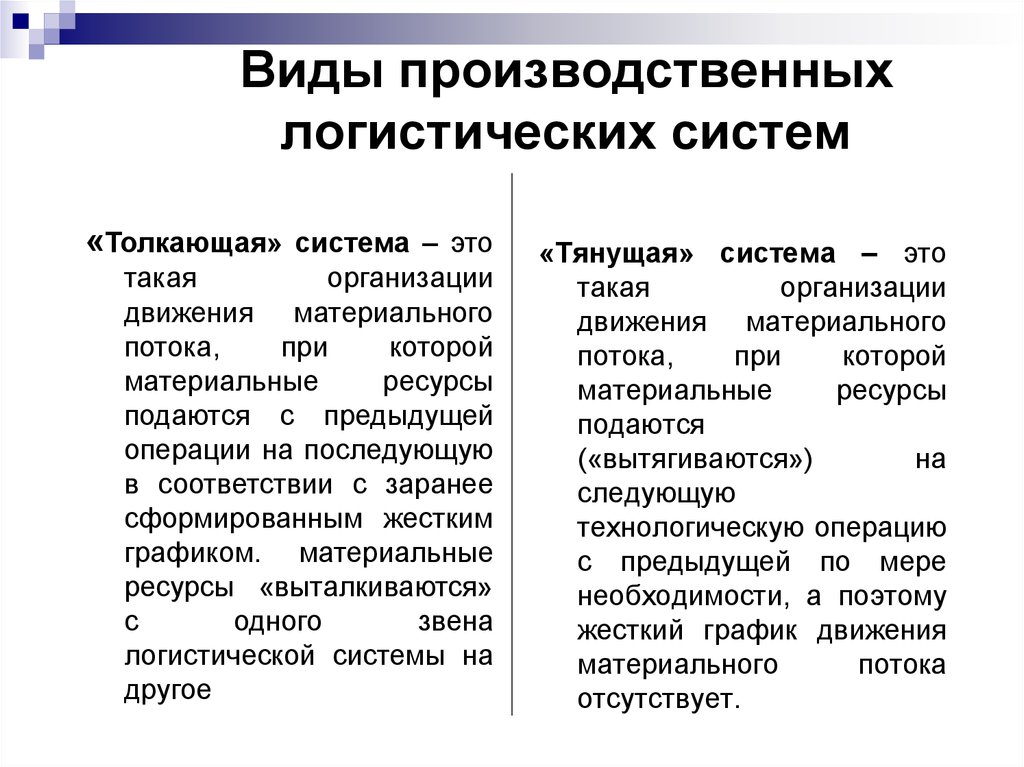
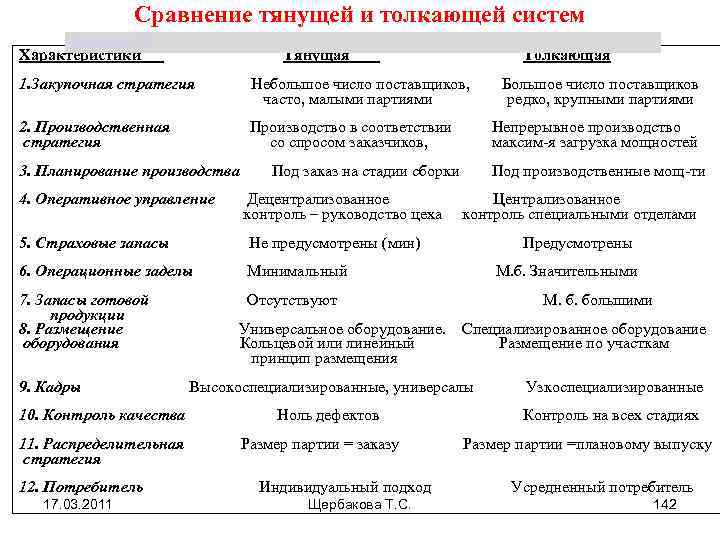
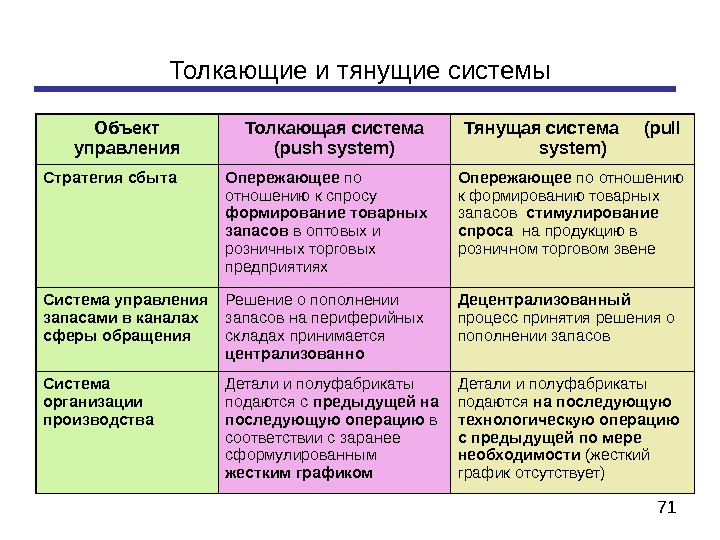
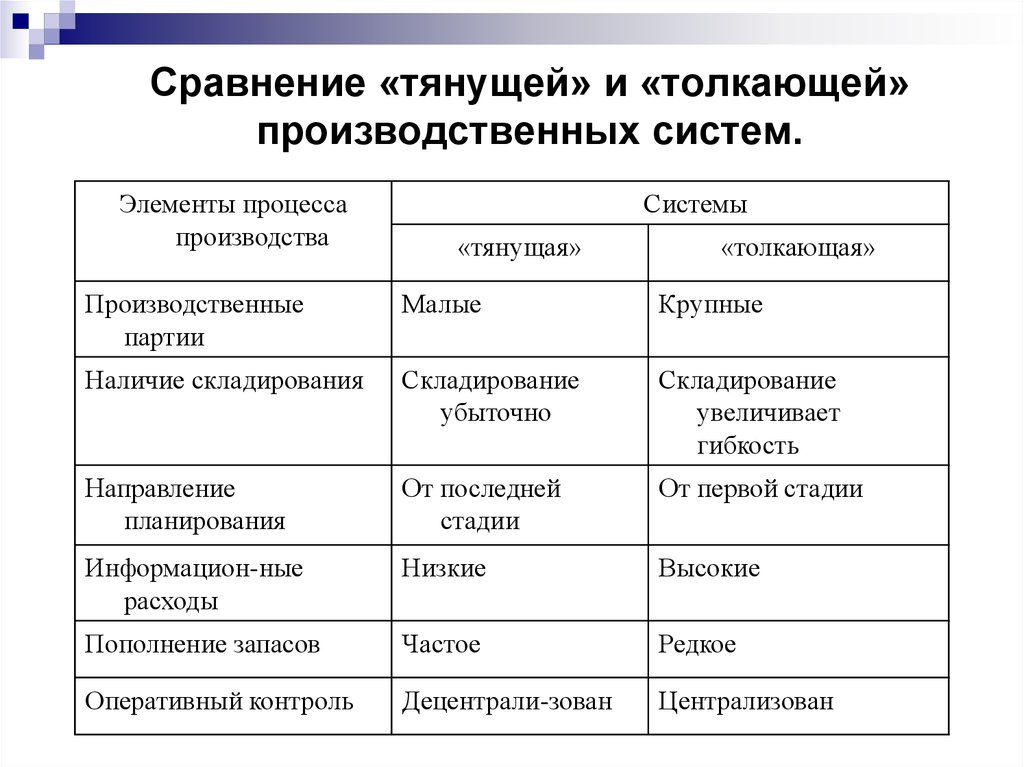
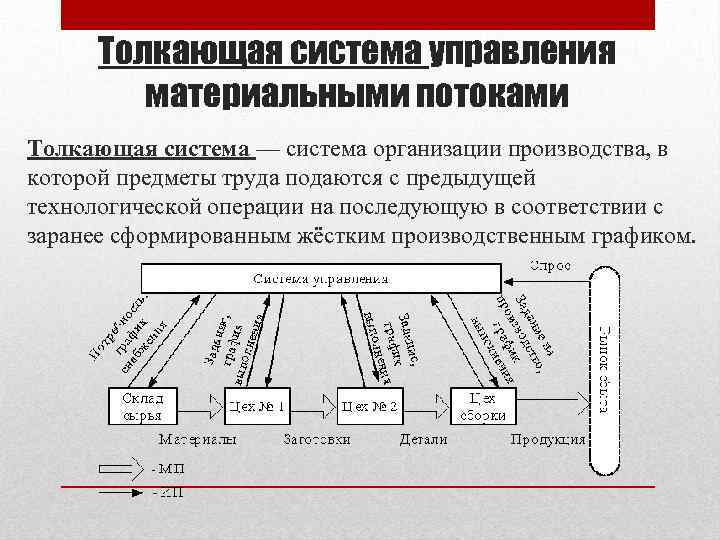
Тянущая производственная логистическая система
Определение 2
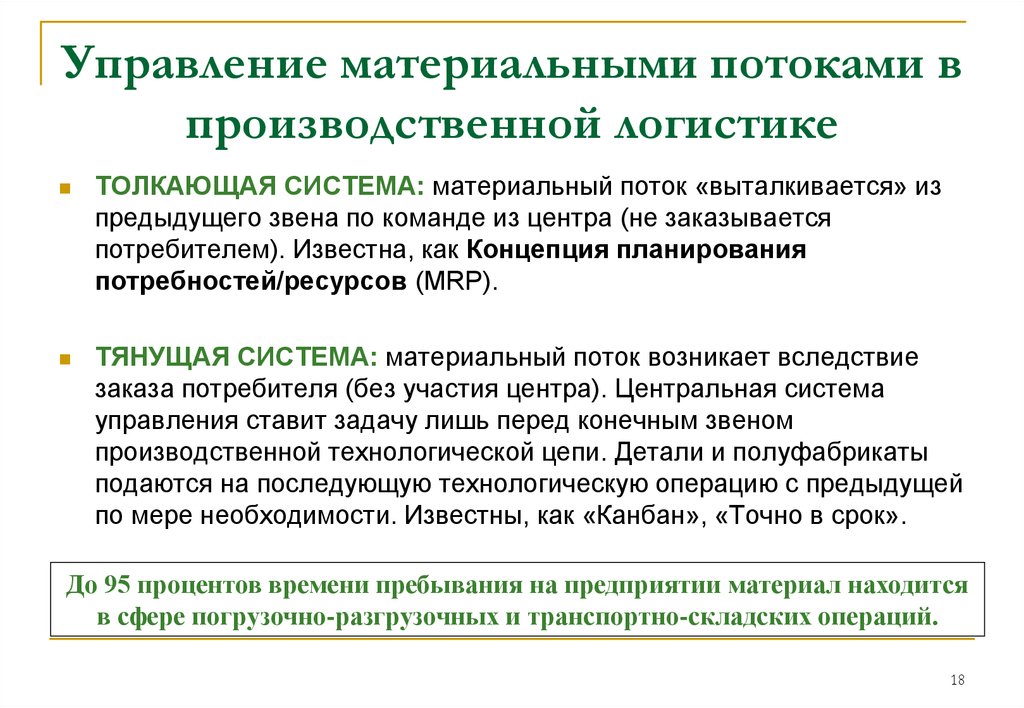
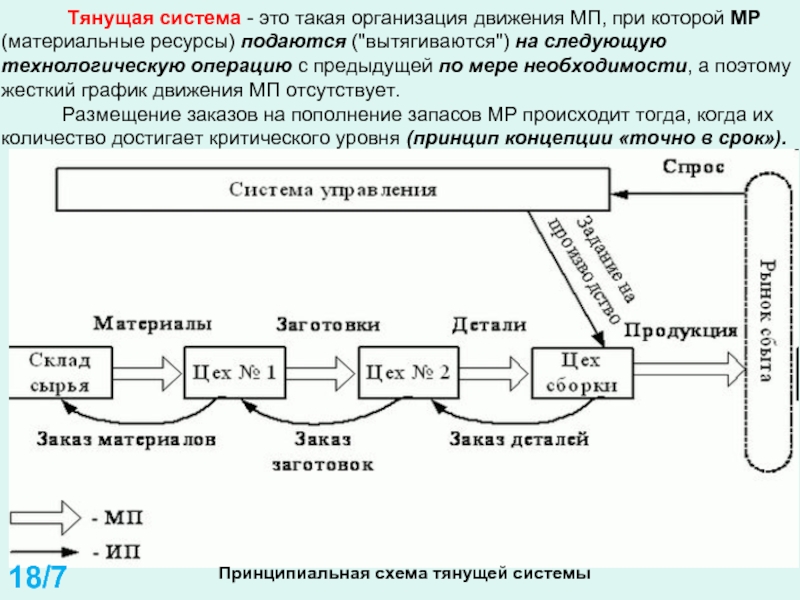
Тянущая производственная логистическая система – способ организации движения материального потока, при котором предметы труда подаются на последующее звено производственной цепи с предыдущего по мере необходимости в соответствии с заказом этого звена-потребителя.
Размещение заказов на пополнение запаса материального ресурса происходит, в тот момент когда их количество достигает порогового уровня. В данной системе жесткий график движения материального потока отсутствует.
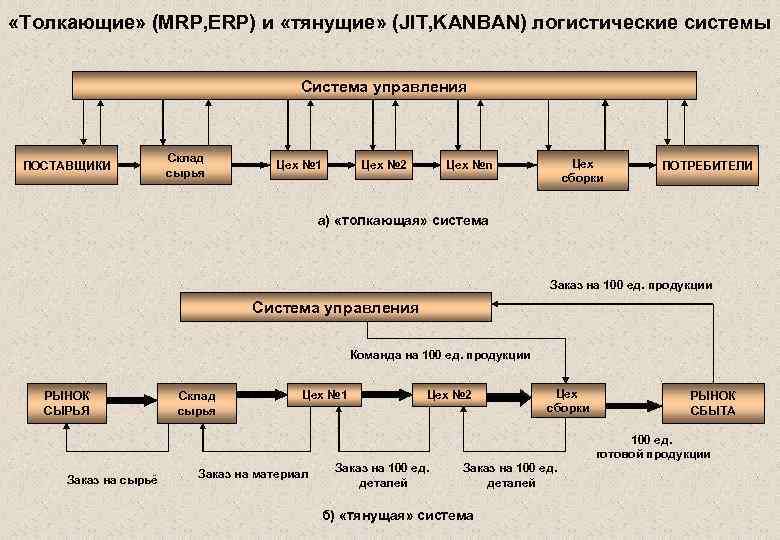
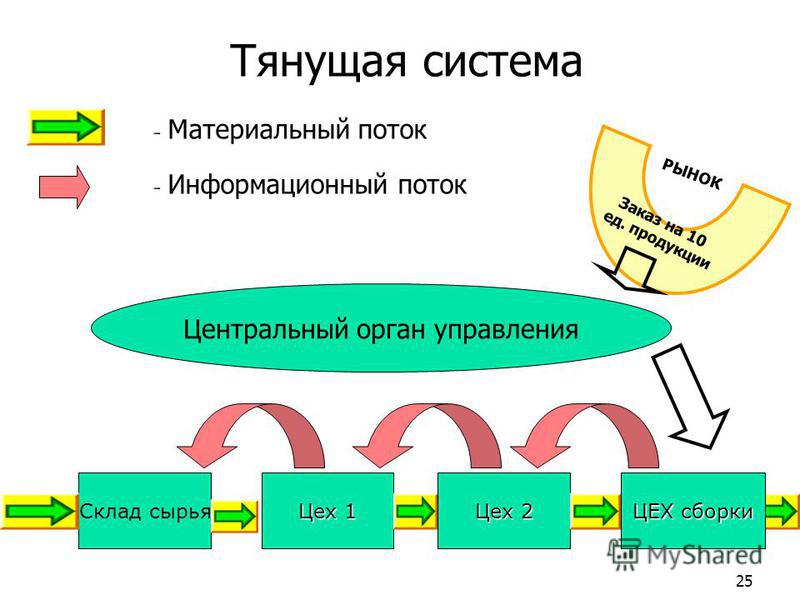
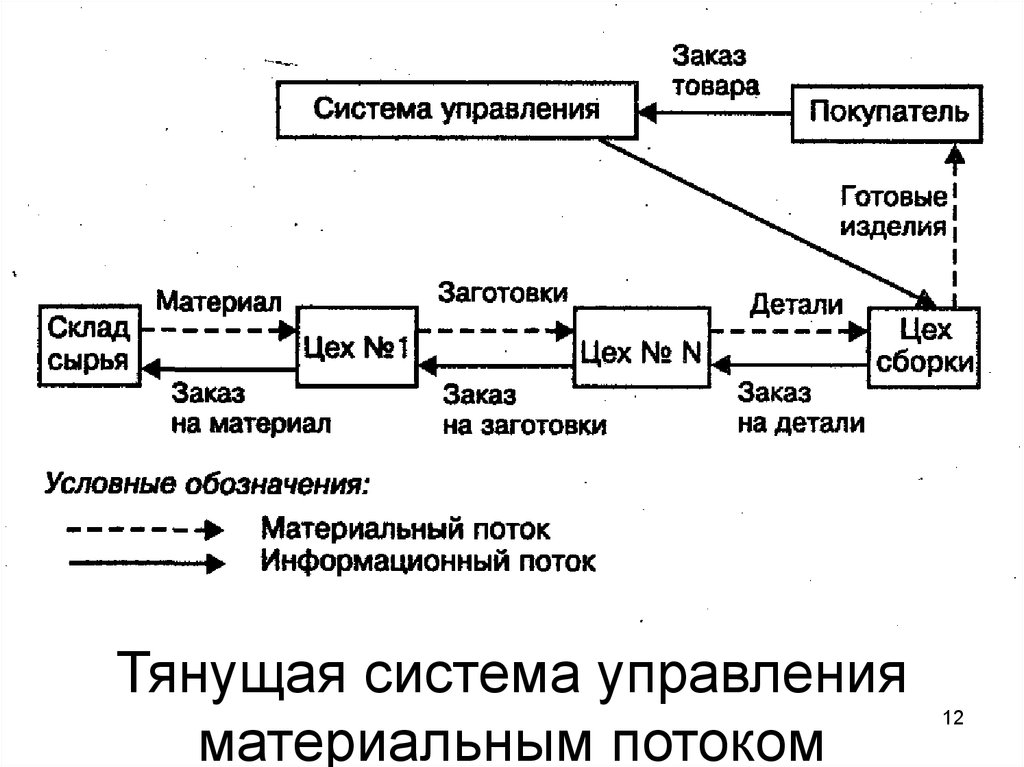
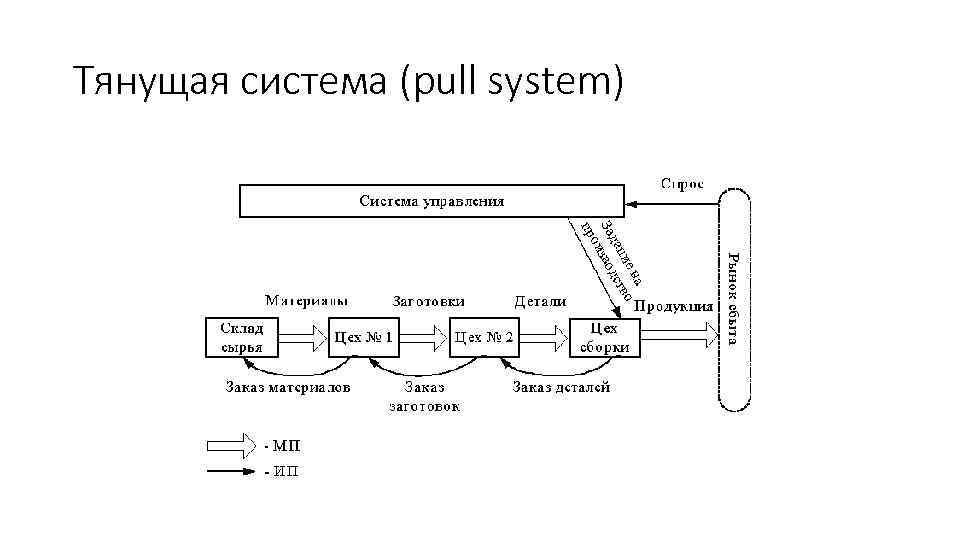
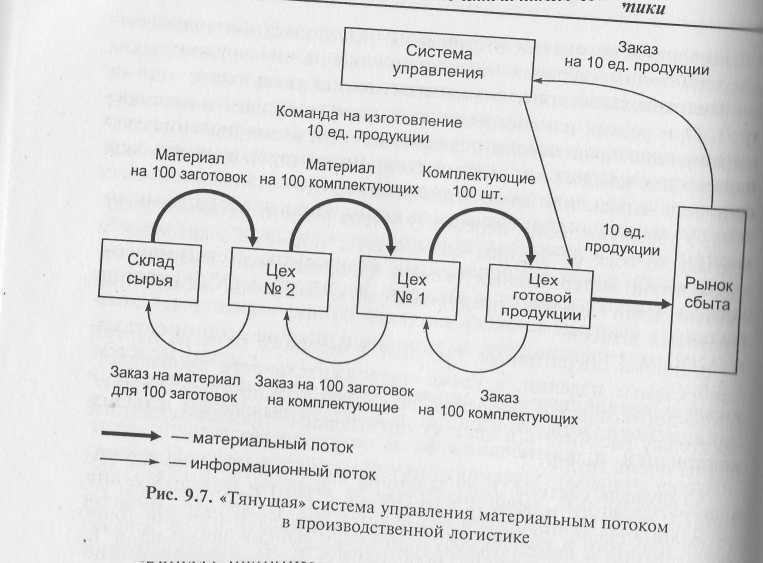
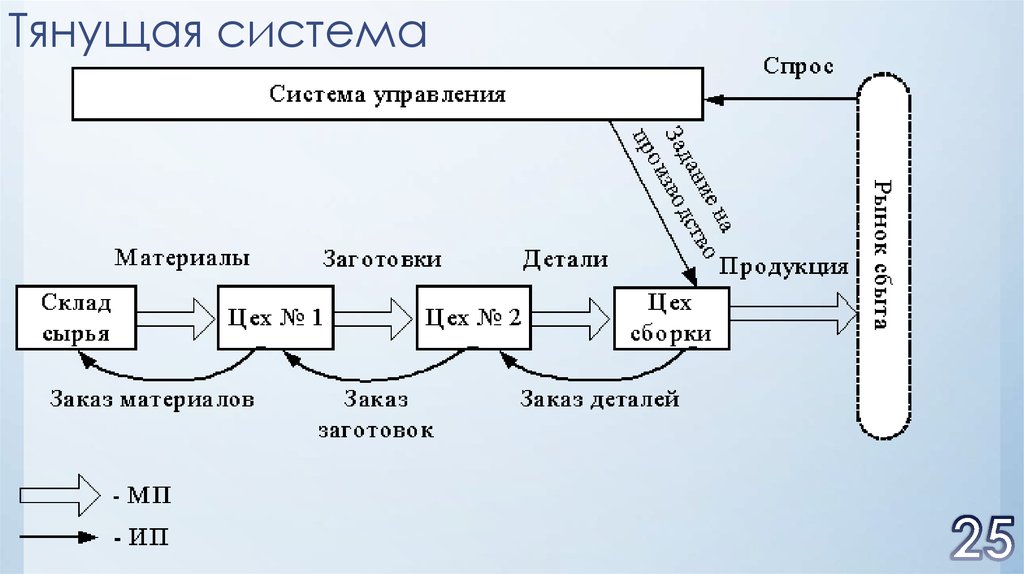
Схема тянущей системы представлена на рисунке.

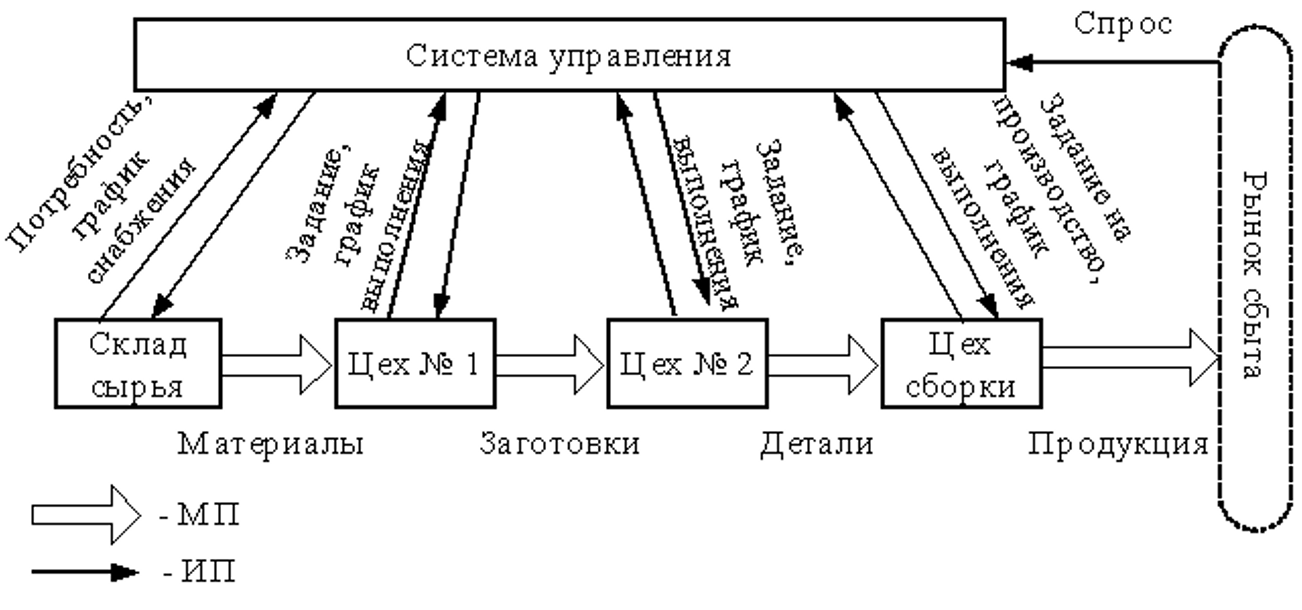
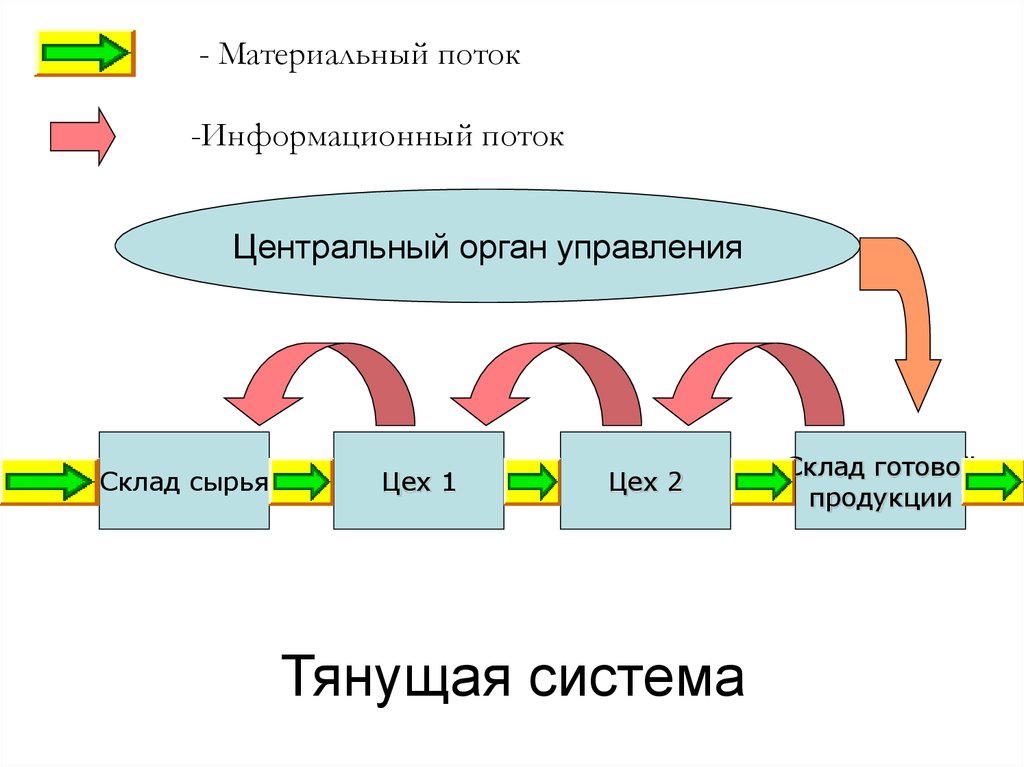
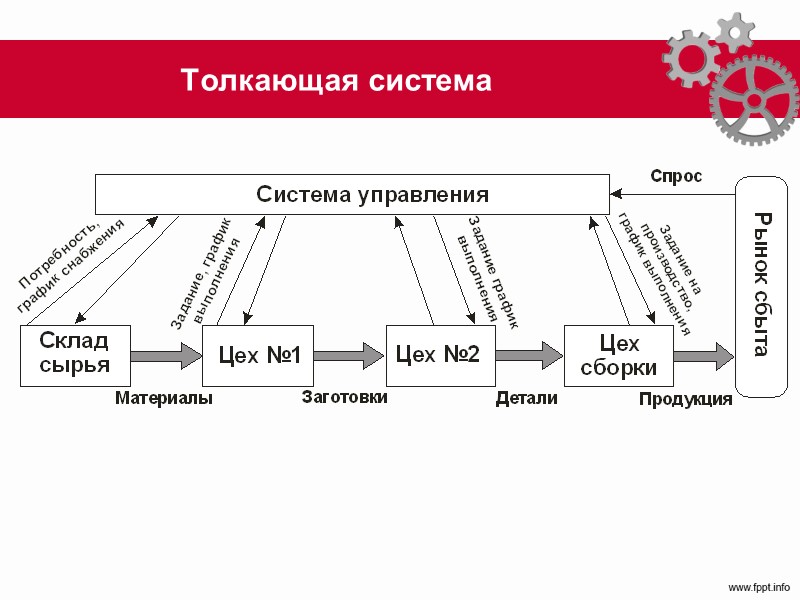
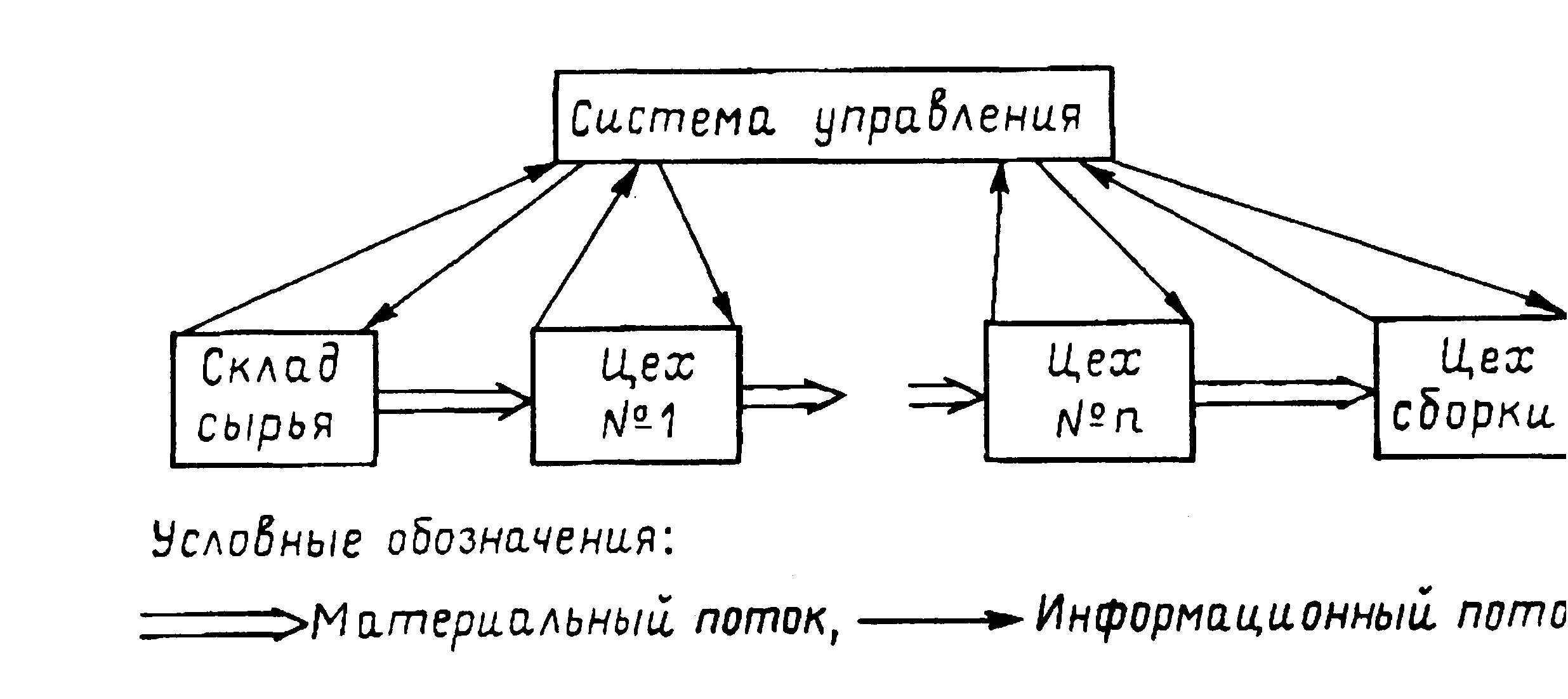
На схеме представлена та же простейшая производственно-логистическая цепь. Однако в отличии от толкающей системы, здесь двусторонние информационные потоки между системой управления и производственными звеньями отсутствуют. Центральная система управления анализирует спрос на готовую продукцию и выдает заказ на производство только конечному звену производственной цепи, которое в свою очередь самостоятельно оценивает свои потребности и размещает заказ в предыдущее звено. Таким образом, материальный поток «вытягивается» с предыдущей операции на последующую.
Особенностью тянущей системы является децентрализация управления, наличие тесных горизонтальных связей между производственными подразделениями.
Пример 1
Пример тянущей системы, применяемой в реальной практике, является Канбан (в переводе с японского «карточка», «ярлык») – система организации производства предприятия Тойота. В данной системе основным средством передачи информации о производственном заказе являются ярлыки.
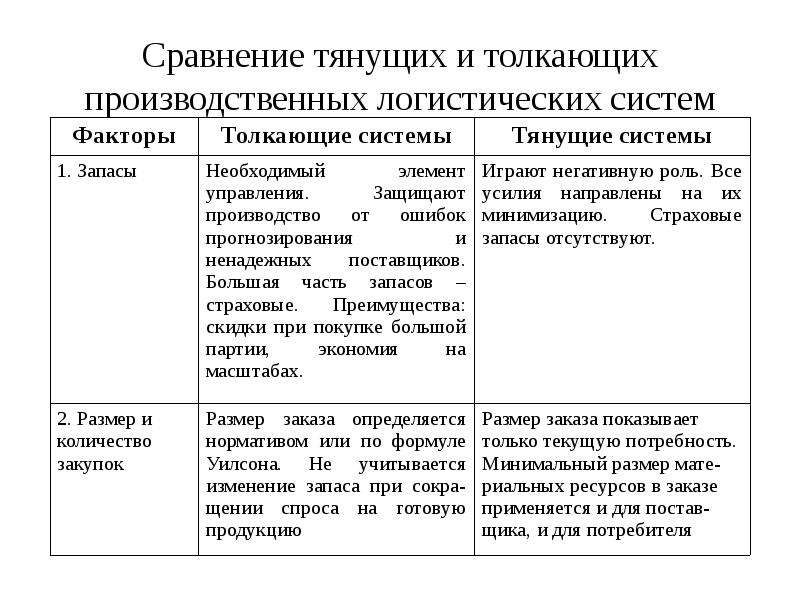
Тянущие системы обладают существенными преимуществами: снижение уровня запасов, реализация принципа «точно во время», высокая гибкость, повышение ответственности рабочих.
Вместе с тем внедрение тянущих систем сопряжено с рядом ограничений: требование высокой надежности поставщиков, поставки сырья малыми партиями, требование высоконадежного оборудования, персонал высокой квалификации, прошедший соответствующее обучение.
При несоблюдении данных требований в производственной цепи неизбежно возникновение сбоев, что для тянущей системы означает остановку всего производственного процесса.
Легкое устранение неполадок
Проблемы со смешанными сетями относительно легко диагностировать и исправить, поскольку точки подключения в сетевых концентраторах расположены очень близко друг к другу по сравнению с общим размером сети.
Концентратор или точка подключения, вызвавшие проблему, можно легко отключить от сети и отремонтировать, в то время как остальная часть сети может нормально функционировать.
Пользователи системы могут даже не заметить, что возникла проблема, что является большим преимуществом для крупных компаний и компаний, которые запускают онлайн-игры для миллионов пользователей.
Основные опоры шасси и Колёсные тормоза
Основные опоры шасси представляют собой тележку, на которую навешиваются колеса, оснащённые тормозами.
Тормоза на самолёте похожи на автомобильные, только существенно мощнее, что не удивительно, т.к. им приходится тормозить машину массой 30-600 тонн со скоростей порядка 250 км/ч до нуля на ограниченной по длине взлётно-посадочной полосе (ВПП).



Самолётные тормоза состоят из «бутерброда» тормозных дисков и колодок.
Колёсные тормоза могут быть задействованы двумя разными способами: «вручную» и автоматически.
«Вручную» пилот тормозит педалями. Может возникнуть вопрос, как пилот умудряется педалями и носовой стойкой управлять и тормозить? Дело в том, что педали самолёта устроены совсем не так, как в автомобиле. Управление по направлению выполняется перемещением педалей вперёд-назад. При этом две педали двигаются синхронно: левая вперёд-правая назад и наоборот. Управление тормозами осуществляется нажатием на педаль. Каждую педаль можно нажимать отдельно, так называемое дифференциальное торможение — это ещё один из способов управления направлением движения по земле. Если левым тормозом пользоваться интенсивнее, чем правым, то и самолёт будет разворачивать влево и наоборот.
Автоматический режим торможения включается сам при наступлении определенного события. Таких событий может быть два:
- Во время посадки: Одновременное касание полосы (срабатывание датчиков обжатия шасси) и нахождение ручек управления двигателями в положении «малый газ»,
- Во время взлёта: Перевод ручек управления двигателем из положения «взлётный режим» в положение «малый газ». Этот режим торможения называется «прерванный взлёт» (Rejected Takeoff, RTO)
Активировать/деактивировать режим автоторможения в самолётах Airbus и SSJ-100 лётчик может с помощью одной из четырёх кнопок под ручкой уборки-выпуска шасси (В Boeing для этого используется переключатель). Три кнопки (LOW, MED, MAX) соответствуют различным интенсивностям торможения при посадке, а четвертая (RTO) активирует режим прерванного взлёта.
С автоторможением при посадке всё очевидно. Давайте рассмотрим режим прерванного взлёта.
Прерванный взлёт — это режим, когда экипаж решает прекратить взлёт по причине существенного отказа. Прервать взлёт можно только до достижения «скорости принятия решения». Скорость принятия решения зависит от длины и состояния поверхности ВПП и рассчитывается исходя из возможности затормозить, не выкатившись за пределы ВПП. Если в процессе набора скорости неисправность происходит после достижения скорости принятия решения, экипаж продолжит взлёт, что бы не случилось. Если до — будет тормозить.
Перед каждым взлётом экипаж обязан активировать автоторможение. Скорость начала и интенсивность торможения при прерванном взлёте напрямую влияет на то, выкатится ли самолёт за пределы полосы или нет. Активированное автоторможение гарантирует, что торможение начнётся немедленно после вывода двигателей из взлётного режима.
Если прерывать взлёт приходится при максимальной взлётной массе и на предельной скорости, то несмотря на то, что кроме колёсных тормозов экипаж задействует реверс и воздушные тормоза, энергия, которую должны поглотить тормоза, разогревает их так, что они начинают светиться не хуже лампочки. После полной остановки самолёта работа тормозов не заканчивается. Они должны выдержать ещё не менее 90 секунд, прежде чем подожгут стойки шасси. По нормативам, что за 90 секунд к самолёту подоспеет пожарная команда, которая всегда дежурит в аэропортах (и успевает!).
Спасибо комментариям — напомнили об одной очень важной функции тормозов авиалайнера: антиблокировочной системе (АБС). Основное отличие АБС самолёта от таковой автомобиля заключается в последствиях блокировки колёс: если у автомобиля блокировка приводит к снижению управляемости и увеличению тормозного пути, то заблокированные колёса самолёта при посадке просто взрываются от трения об асфальт
А без покрышек основных стоек торможение не будет ни эффективным ни безопасным. Так что АБС на самолёте неотключаемая и довольно критическая функция.
RAFAEL ПОСТАВИТ КОНТЕЙНЕРНЫЕ СИСТЕМЫ LITENING 5 И RECCELITE НЕНАЗВАННОМУ ЗАКАЗЧИКУ
RAFAEL ПОСТАВИТ КОНТЕЙНЕРНЫЕ СИСТЕМЫ LITENING 5 И RECCELITE НЕНАЗВАННОМУ ЗАКАЗЧИКУ
17.06.2020
Компания Rafael Advanced Defense Systems объявила о заключении контракта на поставку контейнерных систем целеуказания Litening 5-го поколения и контейнерных разведывательных систем RecceLite для установки на боевых самолетах ВВС неназванной страны.
Стоимость и сроки выполнения контракта также не разглашаются.
По заявлению вице-президента Rafael Гая Орена (Guy Oren), контейнерные системы поставляются в рамках обширного пакета, также включающего ракеты класса «воздух-воздух», боеприпасы класса «воздух-поверхность», средства РЭБ, системы связи и др.
Для справки: ранее, в мае этого года, Rafael также сообщила о продаже контейнерных систем Litening 5 и RecceLite для установки на учебно-боевых самолетах M-346FA группы Leonardo.
Самолет, оборудованный разработанными Rafael контейнерными системами, получает расширенные возможности для ведения боя в современных условиях.
Контейнеры Litening применяются военно-воздушными силами 27 государств и установлены на более чем 25 платформах, включая F-16, F-15, AV-8B, F-18, F-4, F-5, A-10, B-52, «Ягуар» , LCA, AMX, Мираж-2000, «Торнадо», «Тайфун», МиГ-21, МиГ-27, M-346, KC-390, «Грипен», Су-27, Су-30 и другие.
Контейнерная система Litening 5 оборудована инфракрасными (FLIR + SWIR) и цветной дневной HD-камерой, обеспечивающими выдачу изображения в режиме реального времени. Датчики высокого разрешения и эффективная конструкция ЭО/ИК станции обеспечивают безотказную работу на большой дальности. Litening 5 позволяет использовать все виды «умного оружия» класса «воздух-поверхность», включая боеприпасы с лазерным, ЭО/ИК наведением, системой GPS-навигации. Общий налет контейнеров семейства Litening превышает 2 млн. часов.
С помощью разведывательной системы RecceLite самолет может выполнять поиск цели, используя передовые инструменты, а также интеллектуальные алгоритмы наземной станции интерпретации, что позволяет эффективно обнаруживать и сопровождать цель, а также сокращает время прохождения информации от систем обнаружения до средств поражения. Используя передовые средства обнаружения, обработки изображений и искусственный интеллект, система обеспечивает оптимальное использование данных от наземной станции, получаемых в реальном времени разведывательных данных, и выполняет задачи в почти реальном времени.
RecceLite была поставлена 13 заказчикам в различных странах мира и интегрирована на борт самолетов F-16, F-18, «Ягуар», AMX, «Торнадо», «Тайфун», «Грипен», M-346 и др. Она используется ВВС ряда стран Европы, АТР и Южной Америки.
ЦАМТО
Запись опубликована 17.06.2020 в 5:05 пп и размещена в рубрике НОВОСТИ РОССИИ И МИРА. Вы можете следить за обсуждением этой записи с помощью ленты RSS 2.0.
Комментарии и уведомления сейчас закрыты.
Математическая постановка транспортной задачи.
Общая постановка транспортной задачи заключается в определении оптимального плана перевозок некоторого однородного груза из пунктов отправления A1, A2,…, Am в пункты назначения B1, B2,…, Bn. Критерий оптимальности берется минимальная стоимость перевозки или минимальное время доставки груза.
Рассмотрим транспортную задачу, где в качестве критерия оптимальности взята минимальная стоимость перевозок всего груза. Обозначим через Сij тарифы перевозки единицы груза из пункта отправления i в пункт назначения j. Обозначим через Ai запасы груза i-м пункте отправления, а через Bj потребности груза j-м пункте назначения, а через Xj количество единиц груза переводимого из пункта отправления i в пункт назначения j.
Тогда математическая модель транспортной задачи состоит в определении минимального значения функции
при условиях
Поскольку удовлетворяется условия (1.2)−(1.4), то обеспечивается доставка необходимого количества груза в каждый из пунктов назначения, вывоз груза из всех пунктов отправления, а также исключаются обратные перевозки.
Определение 1. Любое неотрицательное решение Xij=∥xij∥ (i=1,..,m; j=1,…,n) систем (1.2) и (1.3) называется допустимым планом транспортной задачи.
Определение 2. План при котором функция (1.1) принимает минимальное значение, называется оптимальным планом транспортной задачи.
Если сумма груза у поставщиков равно общей сумме потребностей в пунктах назначения:
то модель транспортной задачи называется закрытой (или сбалансированной). Если (1.5) не удовлетворяется, то модель транспортной задачи называется открытой (или несбалансированной).
Теорема 1. Для разрешимости транспортной задачи необходимо и достаточно, чтобы выполнялось условие (1.5).
В случае превышения запаса над потребностью, т.е. при
вводится фиктивный (n+1)-ый пункт назначения с потребностью
Соответствующие тарифы считаются равными нулю: ci n+1=0 (i=1,…,m). После этих преобразований получим закрытую модель транспортной задачи.



Аналогично, при вводится фиктивный (m+1) пункт отправления с грузом а тарифы полагаются равными нулю: cm+1j=0 (j=1,…,n). После этих преобразований получим закрытую модель транспортной задачи.
Мы будем рассматривать закрытую модель транспортной задачи. Если же модель транспортной задачи является открытой, то с помощью вышеизложенных преобразований строим закрытую модель транспортной задачи.
Обычно данные транспортной задачи записывают в виде таблицы:
Число переменных Xij равно mn, где m число пунктов отправнения , а n число пунктов назначения. Число уравнений в (1.2) и (1.3) равно m+n. Так как мы рассматриваем закрытую модель транспортной задачи (выполняется равенство (1.5)), то число линейно независимых уравнений равно m+n−1. Следовательно опорный план транспортной задачи может иметь не более m+n−1 отличных от нуля неизвестных.
Если в опорном плане количество отличных от нуля компонентов равно в точности m+n−1, то опорный план называется невырожденным, а если меньше − то вырожденным.
Для решения транспортной задачи сначала определяется начальный опорный план, а затем определяется оптимальный план путем улучшения текущего опорного плана.
Для определения начального опорного плана существует несколько методов. Мы рассмоьтрим три метода. Метод северно-западного угла, метод минимального элемента и метод аппроксимации Фогеля.
Операторы[править]
- — F/A-18A/B (Northrop Grumman AN/AAQ-28(V)5 LITENING AT Block 1)
- — AMX (Rafael LITENING III) и F-5M (не подтверждено)
- — Panavia Tornado GR4(Rafael/Ultra Electronics LITENING III RD) и Eurofighter Typhoon(Rafael/Ultra Electronics LITENING III EF)
- — JAS-39 (Rafael/Zeiss Optronics LITENING III)
- — General Dynamics F-16 Fighting Falcon(Rafael LITENING)
- — Panavia Tornado (Rafael/Zeiss Optronics LITENING probably upgraded to LITENING III) и Eurofighter Typhoon (Rafael/Zeiss Optronics LITENING III)
- — F-4E AUP (Rafael LITENING III)
- — F-16 (Northrop Grumman AN/AAQ-28(V)8 LITENING G4)
- — F-15I (Rafael LITENING III), F-16D (Rafael LITENING, вероятно уже LITENING III) и F-16I (Rafael LITENING III )
- — F-16 (не подтверждено)
- — Sukhoi Su-30 MKI (Rafael LITENING III), HAL Tejas (Rafael LITENING III), SEPECAT Jaguar (не подтверждено), Dassault Mirage 2000H (Rafael LITENING) и Mikoyan MiG-29K(не подтверждено)
- — AV-8B+ Harrier(Northrop Grumman AN/AAQ-28(V)2 LITENING II upgraded to Northrop Grumman AN/AAQ-28(V)4 LITENING AT Block 0), McDonnell Douglas EF-18 Hornet (Rafael/Technobit LITENING III) и Eurofighter Typhoon (не подтверждено)
- — AMX (Rafael LITENING III), Panavia Tornado (не подтверждено) и AV-8B+ Harrier (Northrop Grumman AN/AAQ-28(V)2 LITENING II upgraded to Northrop Grumman AN/AAQ-28(V)4 LITENING AT Block 0)
- — Su-27 (Rafael LITENING III)
- — IAI Kfir C10/C12 (Rafael LITENING III)
- — F-16 Fighting Falcon и F-5TIII
- — General Dynamics F-16 Fighting Falcon (Northrop Grumman AN/AAQ-28(V)6 LITENING AT Block 2)
- — General Dynamics F-16 Fighting Falcon(Northrop Grumman AN/AAQ-28(V)6 LITENING AT Block 2
- — MiG-21 LanceR A (Rafael LITENING) и MiG-21 LanceR C (Rafael LITENING)
- — General Dynamics F-16 Fighting Falcon (Rafael LITENING III)
- США — Fairchild Republic A-10C Thunderbolt II (Northrop Grumman AN/AAQ-28(V)3 LITENING ER upgraded to Northrop Grumman AN/AAQ-28(V)4 LITENING AT Block 0), Boeing B-52H Stratofortress(Northrop Grumman AN/AAQ-28(V)3 LITENING ER upgraded to Northrop Grumman AN/AAQ-28(V)4 LITENING AT Block 0), McDonnell Douglas F-15E Strike Eagle(Northrop Grumman AN/AAQ-28(V)3 LITENING ER upgraded to Northrop Grumman AN/AAQ-28(V)4 LITENING AT Block 0), General Dynamics F-16 Fighting Falcon(Northrop Grumman AN/AAQ-28(V)1 LITENING II/AN/AAQ-28(V)2 LITENING II/AN/AAQ-28(V)2 LITENING II+ upgraded to Northrop Grumman AN/AAQ-28(V)4 LITENING AT Block 0), AV-8B+ Harrier (Northrop Grumman AN/AAQ-28(V)1 LITENING II/AN/AAQ-28(V)2 LITENING II/AN/AAQ-28(V)2 LITENING II+ upgraded to Northrop Grumman AN/AAQ-28(V)4 LITENING AT Block 0), McDonnell Douglas F/A-18 Hornet (Northrop Grumman AN/AAQ-28(V)4 LITENING AT Block 0) и Northrop Grumman EA-6B Prowler(Northrop Grumman AN/AAQ-28(V)4 LITENING AT Block 0)
- — JAS-39 (Rafael/Zeiss Optronics LITENING III)
- — F-4E 2020 Terminator (не подтверждено)
- — McDonnell Douglas F/A-18 Hornet (Northrop Grumman AN/AAQ-28(V)5 LITENING AT Block 2)
- — JAS-39 Gripen(Rafael/Zeiss Optronics LITENING III) и L-159 Alca (не подтверждено)
- — F-16 (Rafael LITENING III)
- — JAS-39 (Rafael/Zeiss Optronics LITENING III)
- — JAS-39 (Rafael/Zeiss OptronicsLITENING III)
Как избавиться от «узких мест»: наводим порядок на складе в три шага
Шаг 1. Проанализируйте текущее состояние складских ресурсов
Нужно проанализировать текущее состояние запасов и ресурсов и сделать прогноз на будущее.
Что следует анализировать:
- принадлежность товара к товарной группе;
- максимальный и минимальный запас товара (штук);
- стоимость запаса товара (руб.);
- количество палет (штук);
- вместимость палет (штук товара);
- размер поддона товара;
- высота, площадь, вес и другие характеристики палеты.
Далее нужно спрогнозировать максимальный прирост объёма товара, беря в расчёт количество палет.
Шаг 2. Оцените, как склад взаимодействует с другими подразделениями
В складской логистике часто бывает разрыв в цепочке взаимодействий между сотрудниками различных подразделений: отделы логистики, продаж, закупок, маркетинга, бухгалтерия и т.д. Это приводит к дефициту или избытку продукции на складе, двойному учёту и другим негативным последствиям.
Прежде всего нужно собрать обратную связь от руководителей отделов и выяснить, какие проблемы и споры у них возникают при взаимодействии с другими отделами, и устранить эти недоработки.
По всем видам товарных запасов нужно установить зоны ответственности. За основу можно взять цикл Деминга — модель непрерывного улучшения процессов PDCA (англ. Plan — Do — Check — Act, «планируй — выполняй — проверяй — корректируй»).
Нужно оценить, как каждый из смежных отделов влияет на потерю производительности работы склада. Например, как быстро доводится информация о неисправности складского оборудования до сервисных и IT — служб. Как быстро они реагируют на заявку и т.п.
Определите пропускную способность склада и возможности отгрузки. Нужно проследить, с какой периодичностью и в каких объёмах грузы поступают на склад и отправляются со склада. Имеются ли возвраты.
Складской учёт и материальную ответственность лучше возложить на сотрудников, которые непосредственно задействованы на складе и понимают особенности его работы.
Шаг 3. Проанализируйте работу склада
Работу склада нужно оценивать с позиции оборачиваемости товаров (уровнем запасов и занимаемой площади). Так вы сможете понять, насколько быстро на складе осуществляются основные операции: отгрузка, приёмка, сортировка.
Нужно устранить факторы, мешающие поиску грузов и мест для размещения вновь прибывшего товара. А также составить временной план приёмки и обслуживания заказов.
Background
The research and development program began at Rafael Advanced Defense Systems’ Missiles Division in Israel, with subsequent completion of Litening I for use in the Israeli Air Force. In 1995 Northrop Grumman Corporation teamed with Rafael for further development and sales of the Litening pod, reaching IOC the same year.
Litening II/ER/AT
Northrop Grumman Corporation and Rafael Advanced Defence Systems completed product improvements on the «Basic Pod» including a third generation FLIR, laser marker and software upgrades (Litening II) which was fielded beginning in 1999.
Northrop Grumman and Rafael Advanced Defence Systems subsequently replaced the «320×256» FLIR with a latest technology «640×512» FLIR. This pod, known as Litening ER, extended the target detection range and was fielded in 2001. The newest version, Litening AT, is in production and was fielded in 2003. It further extends target detection and recognition ranges, improves the target coordinate generation accuracy, and provides multi-target cueing.
Litening AT features a plug-and-play bay configured to accept a wide variety of data-links and recorders. Plug and Play II data-link capability offers increased range, digital data recording and an option to incorporate secure, two-way communications over ultra-high frequency (UHF) radios. Litening’s Plug and Play I, introduced in 2003, was the first data-link to be incorporated in a third generation targeting pod.
Litening G4
Litening G4, which began to be delivered to U.S. forces in 2008, added new sensors for improved target identification and other advanced target recognition and identification features. The Litening G4 provides significant enhancements in terms of both recognition range and image quality due to Rafaels’ AVP imaging capability. The G4’s technologies include a full 1Kx1K forward looking infrared and charge-coupled device, as well as short wave infrared laser imaging sensors, color symbology, tracker improvement and enhanced zoom. The Litening Gen 4 technology and capability is also available in a kit form that allows users to upgrade their currently fielded Litening pods. The Royal Danish Air Force is the first international partner to take delivery of G4 pods. Rafael Advanced Systems announced on the eve of DefExpo 2014 a large order for 150+ Litening targeting pods for the Indian Air Force’s combat aircraft fleet. Litening G4 pods have been chosen by the Indian Air Force for its frontline fighter aircraft, including the Su-30 MKI, MiG-29 and others.
Litening SE
Litening SE provides laser ranging and designation in support of weapon delivery, navigational functions, and recording and data-linking of generated imagery and data. This version includes a Plug-N-Play (PnP) III(TM) digital two-way, data link LRU inside the pod. The pods are being delivered as part of the United States Air Force’s Advanced Targeting Pod – Sensor Enhancement (ATP-SE) program.
Litening III
The Litening III, used on the IAF Tejas, Italian Air Force AMX, and RAF Typhoon aircraft, also provides still image capture for reconnaissance missions in addition to the targeting capabilities found on other models.
RecceLite / RecceLite XR
A gimballed version of the Litening pod for use on drones such as the Predator B or directly integrated into a manned aircraft, in addition it incorporates multi-spectral cameras and C & XU band communication channels to transmit recon feeds. RecceLite XR incorporates the improvements from the Litening 5 pod.
Litening 5
The Litening 5 is the latest version of the pod introduced in 2019. It improves the resolution of the short and medium-wave infrared cameras and introduces a synthetic aperture radar with a 100 km range. The Litening 5 is being introduced to service on Gripen and Typhoon aircraft.
Future developments
Rafael sees an increased market in the future because of the move to stealth platforms which must have targeting systems built in. In 2013 the company was developing a new model to compete for the F-35 requirement. At present F-35’s have the equivalent of a Lockheed Martin Sniper XR called the EOTS (Electro Optical Targeting System) built in and from batch 4 the Advanced EOTS with improved cameras. However, in 2020 the delivery to the Israeli airforce of a prototype F-35I with the EOTS’s apertures covered over fueled speculation that the F-35I would incorporate a version of the Litening 5 over the Advanced EOTS upgrade.

Уборка — выпуск шасси
Кроме тормозов и управления носовой стойкой с шасси связана ещё одна важная функция — уборка/выпуск шасси. Управление уборкой-выпуском шасси в нормальном режиме осуществляется с помощью соответствующей ручки на приборной панели.
Вверх — убрать, вниз — выпустить. Кстати, можно не бояться случайно «сложить» стойки шасси, когда самолёт стоит на земле — в современных авиалайнерах предусмотрена блокировка от таких действий, когда шасси «обжаты» — амортизаторы находятся в сжатом состоянии под действием веса ЛА.
Для улучшения аэродинамических свойств ЛА ниши, в которых размещаются убранные шасси, закрываются створками, поэтому процедура нормальной уборки шасси выглядит примерно так:
- Вычислитель снимает замки закрытого положения створок и подаёт команду на открытие створки
- Створки полностью открыты и зафиксированы в открытом положении. Соответствующие датчики сообщают об этом вычислителю
- Вычислитель открывает замки выпущенного положения стоек шасси и начинает их уборку.
- Стойки полностью убраны и зафиксированы в закрытом положении. Соответствующие датчики сообщают об этом вычислителю
- Вычислитель открывает замки открытого положения створок и начинает их закрывать
- Створки полностью закрыты и зафиксированы в закрытом положении. Вычислитель фиксирует признак окончания уборки шасси
Весь процесс занимает 20-40 секунд. Если в процессе что-то идёт не так, то система прерывает процесс, т.к. есть вероятность что-то сломать. Нормальный выпуск шасси происходит в обратном порядке.
На случай неисправностей в системе уборки-выпуска предусмотрен особый порядок выпуска шасси — аварийный выпуск. Аварийный выпуск активируется кнопкой аварийного выпуска, расположенной под колпачком рядом с ручкой уборки-выпуска шасси. При аварийном выпуске средствами, не зависящими от вычислителя системы уборки-выпуска шасси, снимаются замки убранного положения стоек шасси и створок. Шасси вываливается под собственным весом. Массы каждой из стоек достаточно чтобы выломать створку, даже если та не откроется сама. На замки нижнего положения стойки также встают под действием собственного веса.