Принципиальное устройство подводной лодки
Любой подводный аппарат действительно очень похож на звездолёт: плотная среда, склонная к турбулентности при малейшем возмущении, заставляет разработчиков применять сложные формы для оптимизации движения.
Классическая подводная лодка с дизельным или дизель-электрическим агрегатом заимствует многое от надводных кораблей современного типа: есть палуба и остеклённая рубка и даже ватерлиния, разделяющая корпус на 2 части: надводную и подводную.
Такая лодка большую часть времени — при долгих морских переходах, «на марше», — находится в надводном положении; под водой проходит только скрытное выполнение задачи.
Рубка когда-то использовалась по назначению
Кроме внешнего («легкого») корпуса для формирования обводов, подводная лодка имеет внутренний («прочный») корпус, который и выдерживает возрастающее с глубиной забортное давление воды.
Для движения дизельных лодок под водой придумали шноркель — трубу, которая позволяет двигателю забирать воздух, необходимый для его работы, над поверхностью воды.
Палуба сохранилась и на современных атомных подводных лодках
Она позволяет увеличить продолжительность подводного хода, но для его реализации требуется достаточно низкая скорость, отсутствие волнения и небольшая глубина погружения.
Для больших глубин используются аккумуляторы, заряжающиеся от дизельного движителя во время его работы.
Строительство «Голиафа»
0 Город Кальбе, расположенный на реке Мильде (Milde), был выбран для месторасположения новой радиостанции не случайно: местная почва с повышенной влажностью создавала хорошие условия для заземления. Наличие неподалёку от Кальбе крупного железнодорожного узла, а также развитая дорожная сеть упрощали доставку необходимых стройматериалов. Основным подрядчиком была немецкая (Carl Lorenz AG), победившая в тендере на постройку новой радиостанции, объявленном строительным отделом кригсмарине. Компания была одним из крупнейших немецких производителей электротехники и электроники того времени. В годы войны эта фирма выпускала радиоприёмники, магнитофоны, радиостанции, радиолокаторы и даже системы шифрования. Помимо «Карл Лоренц АГ», в создании «Голиафа» участвовала крупная строительная (Ludwig Schneider), а также многие другие немецкие фирмы. Главным конструктором станции был назначен доктор Фриц Гутцман (Fritz Gutzmann).
Рабочие чертежи будущей радиостанции были завершены в ноябре 1940 года. В дальнейшем доктор Гутцман практически не покидал место строительства, решая прямо на месте все возникающие трудности. Как и на многих других стройках Третьего рейха, широко применялся труд военнопленных – французских и советских, и если первые выполняли в основном квалифицированные работы и питались в немецких столовых, то вторых использовали для самых тяжёлых физических работ. Первая партия из 300 советских пленных была доставлена прямо с фронта в вагонах для перевозки скота. Когда открыли двери, выяснилось, что восемь из них уже умерли, а остальные были в тяжёлом состоянии. Смертность по причине непосильного труда и скудного питания была высокой. Умерших военнопленных хоронили за оградой местного кладбища. Строительство «Голиафа» велось более двух лет, круглосуточно и без выходных. Оно было усложнено высоким уровнем грунтовых вод, создававших большие проблемы – особенно при рытье котлованов и подвалов под здания. В ходе этих работ использовался экскаватор весом свыше 50 тонн, который был установлен на специальную деревянную несущую конструкцию. Дорожная сеть в районе Кальбе была хорошо развита, однако перед началом строительства дороги были посыпаны доменным шлаком, чтобы улучшить их пропускную способность. Шоссе от Кальбе до бывшего местонахождения «Голиафа» местные жители и поныне называют «черным».
Немецкие субмарины и радиосвязь.
0 Смотреть все фото в галерее
Радиосвязь в Императорских военно-морских силах Германии использовалась с самого начала Первой мировой войны. Была она и на немецких подводных лодках. В своей книге «Десять лет и двадцать дней» гросс-адмирал Карл Дёниц, бывший в Первую мировую командиром субмарины, даёт следующее описание ситуации с радиосвязью на подлодках, сложившейся к 1918 году: «Подводные лодки воевали только в одиночку. Они выходили в море, бороздили тёмные глубины, прорывались сквозь противолодочные заграждения, разыскивали противника, вступали в бой – каждая сама по себе, не поддерживая друг друга. Радиотелеграфия – единственное доступное в то время средство связи между подлодками – не позволяла наладить совместные действия. Тогда ещё не было ни длинноволновых, ни коротковолновых передатчиков. В подводном положении мы были полностью отрезаны от мира, и чтобы передать длинноволновый сигнал, находясь на поверхности воды, необходимо было наскоро натянуть между двумя мачтами антенну. Сигнал, несмотря на используемую максимальную мощность, был очень слабым и передавался на небольшое расстояние. А во время его передачи подводная лодка находилась в состоянии лишь частичной готовности к погружению, то есть, была более чем обычно, уязвима для атаки противника, в то время как сама вообще не могла атаковать». Став командующим подводными силами кригсмарине, Карл Дёниц приложил максимум усилий для их развития. Одной из своих основных задач он считал организацию управления действиями подлодок, которая была бы невозможна без наличия высококачественной радиосвязи, позволяющей командирам лодок принимать радиограммы из штаба подводной войны и следовать его указаниям. Как же была организована радиосвязь на немецких подводных лодках? Она делилась на три диапазона: коротковолновая (КВ), средневолновая (СВ) и сверхдлинноволновая (СДВ). Связь в КВ-диапазоне являлась основной, так как она позволяла не только осуществлять приём радиограмм, но и передавать сообщения в штаб подводных сил. Средневолновая связь служила в основном для радиообмена между лодками и использовалась крайне редко. Связь СДВ-диапазона считалась дублирующей по отношению к коротковолновой
Однако у сверхдлинных волн имелось одно очень важное преимущество: они обладали способностью проникать сквозь водную среду. Это позволяло немецким подводным лодкам, во-первых, принимать радиосообщения на небольшой глубине под водой – в отличие от сообщений, переданных на коротких волнах, для приёма которых лодка должна была всплыть
Во-вторых, СДВ-связь позволяла осуществлять уверенный приём радиограмм в любое время суток и любое время года в отдалённых от Европы районах земного шара, т.к. она была куда менее зависима от ионосферных явлений по сравнению с коротковолновой. В ходе Второй мировой войны, когда зона действия немецких субмарин расширилась до пределов Южной Атлантики, а крейсерские подводные лодки стали совершать походы в Индийский океан вплоть до берегов Японии, важность СДВ-связи ещё более возросла.
Основным приёмником сверхдлинных волн на немецких подводных лодках был T3PLLä38. Производимый , он использовался до самого конца войны.
×
Общий вид радиоприемника T3PLLä38. На настроечной шкале видны пять диапазонов: 70–150 кГц, 150–350 кГц, 350–640 кГц, 640–1200 кГц, 15–33 кГц.
Он был связан с гирокомпасом и расположенной на рубке подводной лодки выдвижной рамочной антенной СДВ/ДВ-диапазонов, которая вращалась на 360°. Услышав интересующий его сигнал, радист по шкале, встроенной в стол и показывавшей данные с гирокомпаса, мог определить пеленг на источник сигнала.
Рамочная антенна на рубке.
Акустическая передача
Советская система «ЗЕВС» работает на частоте 82 Гц (длина волны 3656 км), американская «Seafarer» (с англ.
-
«мореплаватель») — 76 Гц (длина волны 3944,64 км). Длина волны в этих передатчиках сравнима с радиусом Земли. До 1977 года использовалась система «Sanguine», находящаяся в Висконсине . Частота — 76 Гц или 45 Гц.
ВМС Великобритании предпринимали попытки построить свой передатчик в Шотландии , но проект был свёрнут.
Радиоволны инфранизких частот
или infra low frequencies
(ИНЧ
, ILF 300-3000 Гц) имеют более компактные элементы антенн, но меньшее проникновение в толщу морских и земных глубин.
Радиоволны очень низких частот
или very low frequencies
(ОНЧ
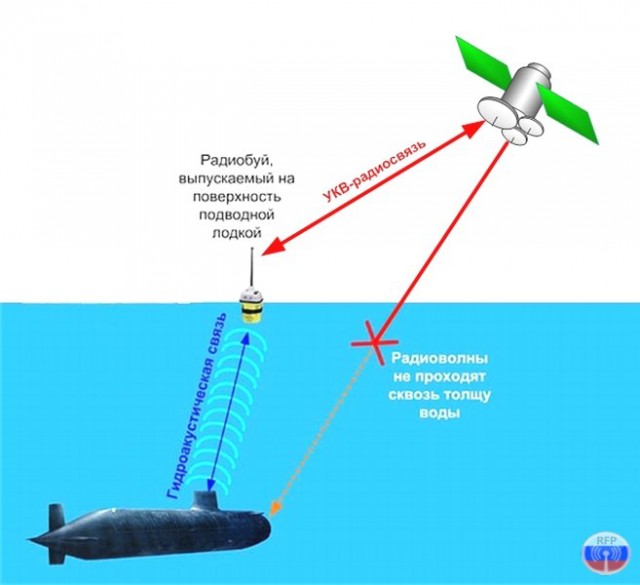
, VLF 3-30 кГц) имеют ещё более компактные антенны по сравнению с предыдущим диапазонам, но могут проникать в морскую воду только на глубины до 20 метров, преодолевая поверхностный (скин) эффект . Подводная лодка, находящаяся на небольшой глубине, может использовать этот диапазон для связи. Подводная лодка, находящаяся гораздо глубже, может использовать буй с антенной на длинном кабеле. Буй может находиться на глубине нескольких метров и из-за малых размеров не обнаруживаться сонарами противника. Первый в мире ОНЧ-передатчик, «Голиаф », был построен в Германии в 1943 году, после войны перевезён в СССР, в 1949-1952 годах восстановлен в Нижегородской области и эксплуатируется до сих пор. В Белоруссии, под Вилейкой , функционирует мегаваттный ОНЧ-передатчик для связи с подводными лодками ВМФ России — 43-й узел связи .


![3.2. скрытность действий [1989 хвощ в.а. - тактика подводных лодок]](https://jkkrd.ru/wp-content/uploads/c/e/3/ce33b997e2a2d04f514034b8f00bb405.png)




Радиоволны низких частот
или low frequencies
(НЧ
, LF 30-300 кГц) также могут использоваться для связи с подземными или морскими объектами. Американский передатчик «Seafarer» работал на частоте 76 кГц и состоял из двух антенн в Клэм Лэйк, Висконсин (с 1977 года) и на базе ВВС «Сойер» в Мичигане (c 1980 года). Был демонтирован в сентябре 2004 года .
Недостатки радиосвязи указанных диапазонов:
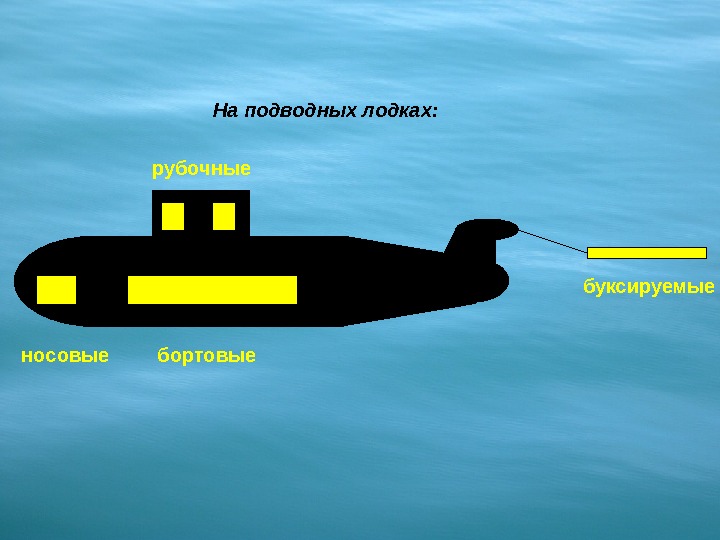
- Линия связи является односторонней. Подводная лодка на борту не может иметь свой передатчик из-за огромного требуемого размера антенны. Даже приёмные антенны КНЧ/СНЧ-связи отнюдь не малы: лодки используют выпускаемые буксируемые антенны длиной от сотен метров.
- Скорость такого канала крайне мала — порядка нескольких знаков в минуту. Таким образом, разумно предположить, что передаваемые сообщения содержат общие инструкции или команды по использованию других видов связи.
Антенна
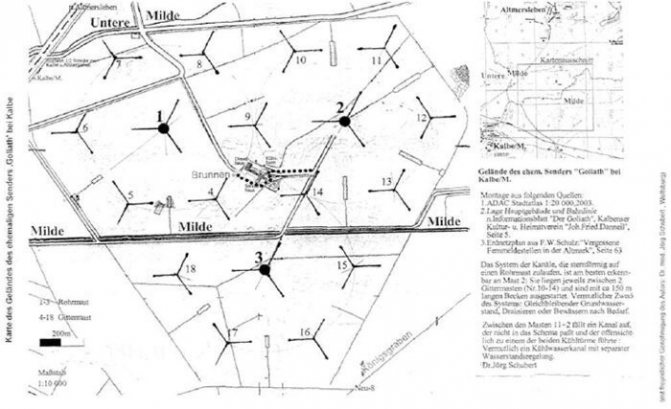
Файл:Scheme of Goliath transmitter.svg Схема антенны станции: ● — центральные (трубчатые) мачты; Δ — угловые (решетчатые) мачты; красный квадрат — центральный антенный павильон (точка питания)
Антенна радиостанции представляет собой вариант антенны Александерсена — несимметричную реализацию вертикального шлейф-вибратора с тремя вертикальными элементами-шлейфами (центральными мачтами, называемыми также трубчатыми мачтами), соединенными между собой электрически многопроводной квазигоризонтальной частью («полотном»). Полотно также выполняет функции емкостной нагрузки, а его снижение, выполненное из трех групп проводников в центре конструкции, является активным (четвертым) элементом: снижение подходит к точке возбуждения, располагающейся в центральном антенном павильоне. Излучение антенны создается, прежде всего, центральными мачтами и снижением.
Центральные мачты установлены на изоляторах, их основания соединены с развитой системой заземления через удлинительные индуктивные катушки. Катушки выполнены из литцендрата и намотаны пятью параллельно идущими проводниками диаметром 10 мм каждый. Высота катушек 5 м, диаметром 3,2 м, они расположенные в антенных павильонах у основания центральных мачт. Заземление выполнено из оцинкованных стальных лент сечением 10×2 мм, радиально расходящихся вокруг каждой из центральных мачт и вокруг центрального павильона. Общая длина уложенного в землю провода составляет 350 км.
Для каждой из трех центральных мачт полотно состоит из шести групп проводников, образующих по форме шесть правильных треугольников с длиной стороны 400 м. Конструктивно полотно представляет систему стальных тросов в подвижной алюминиевой оболочке, соединённых между собой муфтами. Полотно поддерживается в натяжении противовесами массой 6900 кг. Центральные мачты представляют собой стальные трубы высотой 210 м, углы полотна закреплены на решётчатых мачтах высотой 170 м, расположенных в вершинах правильных шестиугольников.
Проводники полотна совместно с поддерживающими их центральными мачтами напоминают три гигантских зонта диаметром около 1 км каждый, в связи с чем в некоторых источниках антенну «Голиафа» называют зонтичной.
Одна из пятнадцати решетчатых мачт
Автомобиль в сравнении с решетчатой мачтой
Силовая установка атомной подводной лодки: реактор, турбина и электродвигатель
Базовый принцип работы атомного реактора
Главный агрегат, отличающий атомную от дизельной лодку — реактор. В зависимости от его типа, может варьироваться тип привода.
В типичном двигателе с ядерным реактором охлажденная вода под давлением попадает внутрь корпуса реактора, содержащего ядерное топливо. Нагретая вода выходит из реактора, превращается в пар и вращает лопасти турбины.
Вал турбины подключается к валу электродвигателя через редуктор для более эффективного преобразования энергии в электрическую.
В свою очередь, вал электродвигателя при помощи механизма сцепления соединяется с гребным валом. Одновременно с этим часть электроэнергии запасается в бортовых аккумуляторах.
Рабочий отсек АПЛ
Переход энергии молекул пара в кинетическую энергию лопаток приводит к конденсации пара обратно в воду, которая вновь поступает в реактор.
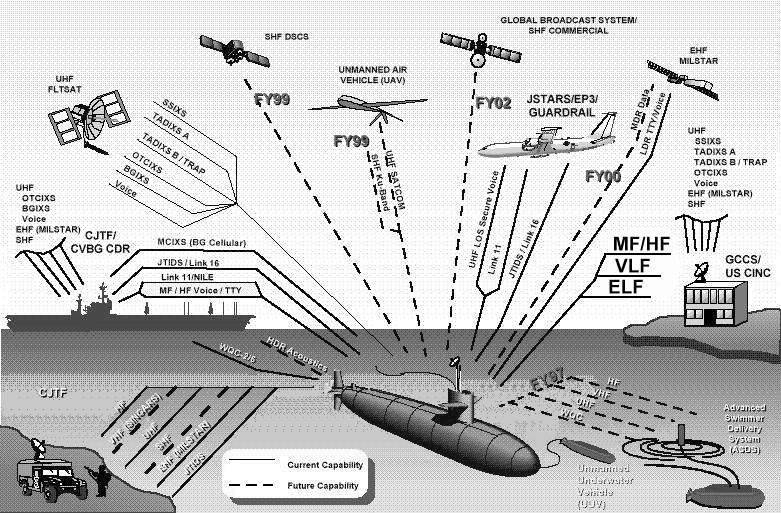
Спутники
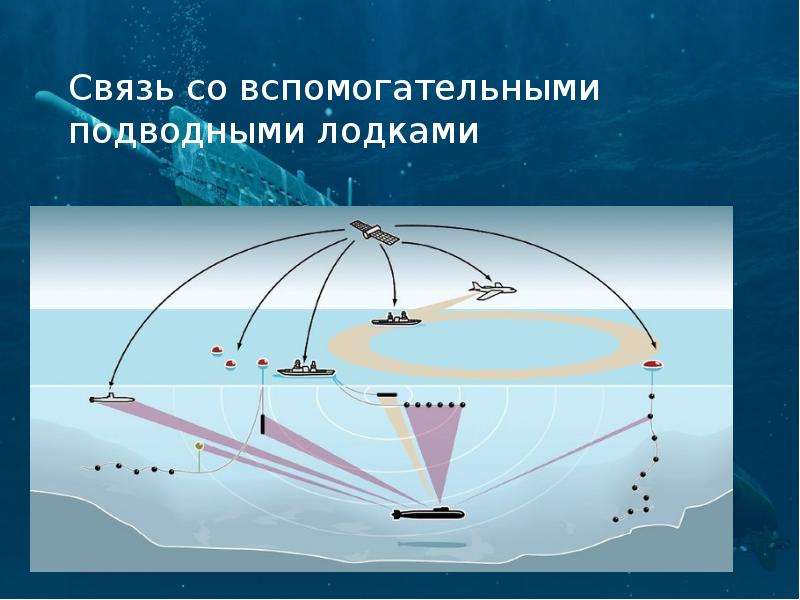
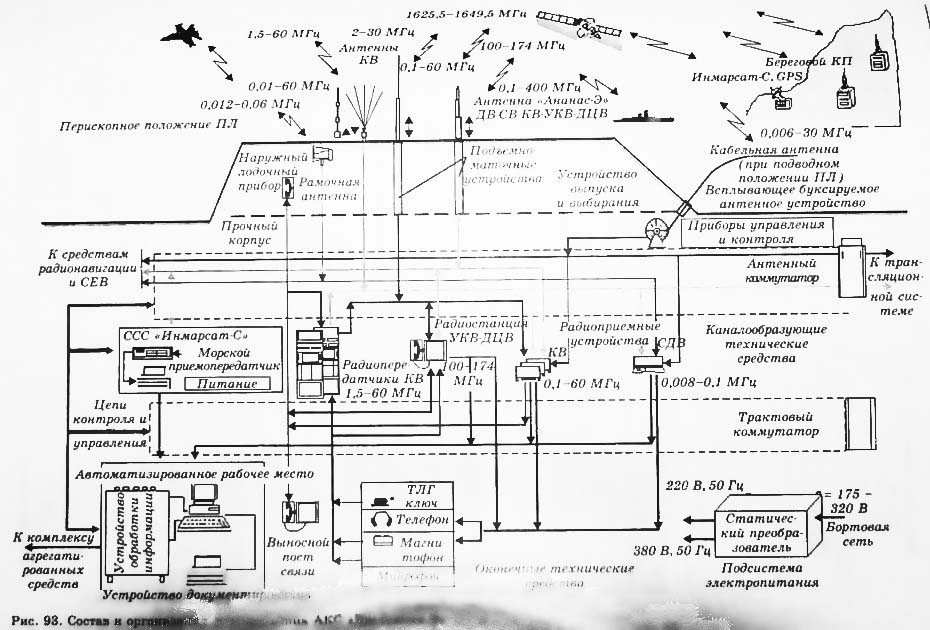
Если субмарина находится в надводном положении, то она может использовать обычный диапазон радиосвязи, как и прочие морские суда. Это не означает использование обычного коротковолнового диапазона: чаще всего это связь с военным для использования их в качестве ретрансляторов сигнала и обеспечения связи кораблей из любой точки мира с командованием ВМФ. По проекту было модифицировано три субмарины.
Аналогичное оборудование установлено на воздушном командном пункте — самолёте Ил-80 .
В ВМС США для связи с ПЛ в СДВ диапазоне используется самолёт E-6 Mercury (созданный на базе пассажирского Боинга-707, используются буксируемые антенны длиной 7925 м (основная) и 1219 м (вспомогательная)). Собственно, этот самолёт не является чистым ретранслятором сигналов боевого управления для ПЛАРБ, а служит командным пунктом для управления стратегическими ядерными силами. В состав экипажа, помимо 5 человек, непосредственно управляющих машиной, ещё входит 17 операторов. Правительственный воздушный командный пункт E-4A (на базе Боинга-747) также имеет станцию СДВ и буксируемую трос-антенну длиной около 8 км.
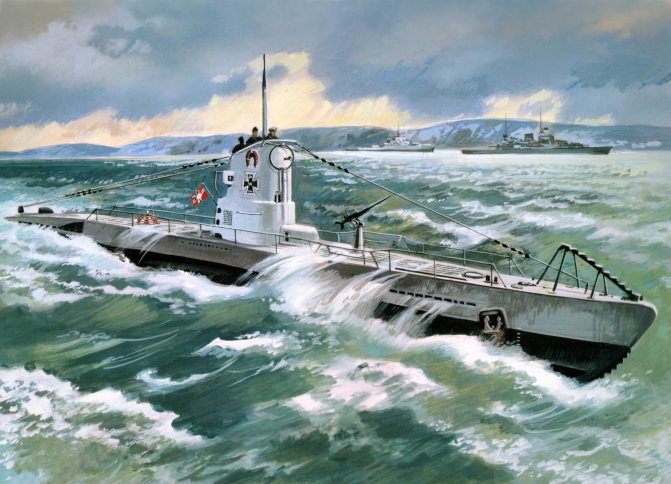
Немецкие субмарины и радиосвязь.
0 Смотреть все фото в галерее
Радиосвязь в Императорских военно-морских силах Германии использовалась с самого начала Первой мировой войны. Была она и на немецких подводных лодках. В своей книге «Десять лет и двадцать дней» гросс-адмирал Карл Дёниц, бывший в Первую мировую командиром субмарины, даёт следующее описание ситуации с радиосвязью на подлодках, сложившейся к 1918 году: «Подводные лодки воевали только в одиночку. Они выходили в море, бороздили тёмные глубины, прорывались сквозь противолодочные заграждения, разыскивали противника, вступали в бой – каждая сама по себе, не поддерживая друг друга. Радиотелеграфия – единственное доступное в то время средство связи между подлодками – не позволяла наладить совместные действия. Тогда ещё не было ни длинноволновых, ни коротковолновых передатчиков. В подводном положении мы были полностью отрезаны от мира, и чтобы передать длинноволновый сигнал, находясь на поверхности воды, необходимо было наскоро натянуть между двумя мачтами антенну. Сигнал, несмотря на используемую максимальную мощность, был очень слабым и передавался на небольшое расстояние. А во время его передачи подводная лодка находилась в состоянии лишь частичной готовности к погружению, то есть, была более чем обычно, уязвима для атаки противника, в то время как сама вообще не могла атаковать». Став командующим подводными силами кригсмарине, Карл Дёниц приложил максимум усилий для их развития. Одной из своих основных задач он считал организацию управления действиями подлодок, которая была бы невозможна без наличия высококачественной радиосвязи, позволяющей командирам лодок принимать радиограммы из штаба подводной войны и следовать его указаниям. Как же была организована радиосвязь на немецких подводных лодках? Она делилась на три диапазона: коротковолновая (КВ), средневолновая (СВ) и сверхдлинноволновая (СДВ). Связь в КВ-диапазоне являлась основной, так как она позволяла не только осуществлять приём радиограмм, но и передавать сообщения в штаб подводных сил. Средневолновая связь служила в основном для радиообмена между лодками и использовалась крайне редко. Связь СДВ-диапазона считалась дублирующей по отношению к коротковолновой
Однако у сверхдлинных волн имелось одно очень важное преимущество: они обладали способностью проникать сквозь водную среду. Это позволяло немецким подводным лодкам, во-первых, принимать радиосообщения на небольшой глубине под водой – в отличие от сообщений, переданных на коротких волнах, для приёма которых лодка должна была всплыть
Во-вторых, СДВ-связь позволяла осуществлять уверенный приём радиограмм в любое время суток и любое время года в отдалённых от Европы районах земного шара, т.к. она была куда менее зависима от ионосферных явлений по сравнению с коротковолновой. В ходе Второй мировой войны, когда зона действия немецких субмарин расширилась до пределов Южной Атлантики, а крейсерские подводные лодки стали совершать походы в Индийский океан вплоть до берегов Японии, важность СДВ-связи ещё более возросла.
Основным приёмником сверхдлинных волн на немецких подводных лодках был T3PLLä38. Производимый , он использовался до самого конца войны.
Общий вид радиоприемника T3PLLä38. На настроечной шкале видны пять диапазонов: 70–150 кГц, 150–350 кГц, 350–640 кГц, 640–1200 кГц, 15–33 кГц.



Он был связан с гирокомпасом и расположенной на рубке подводной лодки выдвижной рамочной антенной СДВ/ДВ-диапазонов, которая вращалась на 360°. Услышав интересующий его сигнал, радист по шкале, встроенной в стол и показывавшей данные с гирокомпаса, мог определить пеленг на источник сигнала.
Рамочная антенна на рубке.
Подводные лодки
Атомные ПЛ
Атомные ПЛ
С баллистическими ракетами
Проект 667БДР
Атомный ракетный подводный крейсер стратегического назначения К-44 «Рязань»Атомный ракетный подводный крейсер стратегического назначения К-211 «Петропавловск-Камчатский»Атомный ракетный подводный крейсер стратегического назначения К-223 «Подольск»Атомный ракетный подводный крейсер стратегического назначения К-433 «Святой Георгий Победоносец»Атомный ракетный подводный крейсер стратегического назначения К-506 «Зеленоград»
Проект 667БДРМ
Атомный ракетный подводный крейсер стратегического назначения К-51 «Верхотурье»Атомный ракетный подводный крейсер стратегического назначения К-84 «Екатеринбург»Атомный ракетный подводный крейсер стратегического назначения К-18 «Карелия»Атомный ракетный подводный крейсер стратегического назначения К-117 «Брянск»Атомный ракетный подводный крейсер стратегического назначения К-407 «Новомосковск»Атомный ракетный подводный крейсер стратегического назначения К-114 «Тула»
Проект 941
Атомный ракетный подводный крейсер стратегического назначения «Дмитрий Донской»Атомный ракетный подводный крейсер стратегического назначения ТК-17 «Архангельск»Атомный ракетный подводный крейсер стратегического назначения ТК-20 «Северсталь»
Проект 955
Атомный ракетный подводный крейсер стратегического назначения «Юрий Долгорукий»Атомный ракетный подводный крейсер стратегического назначения «Александр Невский»Атомный ракетный подводный крейсер стратегического назначения «Владимир Мономах»
Проект 955А
Атомный ракетный подводный крейсер стратегического назначения «Князь Владимир»Атомный ракетный подводный крейсер стратегического назначения «Князь Олег»Атомный ракетный подводный крейсер стратегического назначения «Генералиссимус Суворов»
С крылатыми ракетами
Атомный ракетный подводный крейсер «Казань»Атомный ракетный подводный крейсер «Новосибирск»Атомный ракетный подводный крейсер «Красноярск»
Проект 949А
Атомная подводная лодка К-119 «Воронеж»Атомная подводная лодка К-266 «Орел»Атомная подводная лодка К-410 «Смоленск»Атомная подводная лодка К-456 «Тверь»Атомная подводная лодка К-132 «Иркутск»Атомная подводная лодка К-186 «Омск»Атомная подводная лодка К-150 «Томск»Атомная подводная лодка К-442 «Челябинск»
С ракетно-торпедным вооружением
Проект 671РТМК
Атомная подводная лодка «Даниил Московский»Атомная подводная лодка «Тамбов»Атомная подводная лодка Б-138 «Обнинск»Атомная подводная лодка Б-388 «Петрозаводск»
Проект 971
Атомная подводная лодка К-157 «Вепрь»Атомная подводная лодка К-295 «Самара»Атомная подводная лодка К-317 «Пантера»Атомная подводная лодка К-461 «Волк»Атомная подводная лодка К-331 «Магадан»Атомная подводная лодка К-328 «Леопард»Атомная подводная лодка К-154 «Тигр»Атомная подводная лодка К-419 «Кузбасс»Атомная подводная лодка К-263 «Барнаул»Атомная подводная лодка К-391 «Братск»Атомная подводная лодка К-322 «Кашалот»
Атомная подводная лодка К-335 «Гепард»
АС-31
Атомные подводные лодки специального назначения
КС-129 «Оренбург»
Дизельные ПЛ
Проект 877
Дизельная подводная лодка Б-187 «Комсомольск-на-Амуре»Дизельная подводная лодка Б-394 «Нурлат»Дизельная подводная лодка Б-445 «Святой Николай Чудотворец»Дизельная подводная лодка Б-459 «Владикавказ»Дизельная подводная лодка Б-402 «Вологда»Дизельная подводная лодка Б-190 «Краснокаменск»Дизельная подводная лодка Б-177 «Липецк»Дизельная подводная лодка Б-471 «Магнитогорск»Дизельная подводная лодка Б-345 «Могоча»Дизельная подводная лодка Б-401 «Новосибирск»Дизельная подводная лодка Б-260 «Чита»Дизельная подводная лодка Б-808 «Ярославль»Дизельная подводная лодка Б-806 «Дмитров»Дизельная подводная лодка Б-227 «Выборг»Дизельная подводная лодка Б-494 «Усть-Большерецк»Дизельная подводная лодка Б-464 «Усть-Камчатск»
Проект 677 «Лада»
Дизель-электрическая подводная лодка Б-585 «Санкт-Петербург»Дизель-электрическая подводная лодка «Кронштадт»
Проект 636.3
Дизель-электрическая подводная лодка «Новороссийск»Дизель-электрическая подводная лодка «Ростов-на-Дону»Дизель-электрическая подводная лодка «Старый Оскол»Дизель-электрическая подводная лодка «Краснодар»Дизель-электрическая подводная лодка «Великий Новгород»Дизель-электрическая подводная лодка «Колпино»Дизель-электрическая подводная лодка «Петропавловск-Камчатский»Дизель-электрическая подводная лодка «Волхов»Дизель-электрическая подводная лодка «Магадан»Дизель-электрическая подводная лодка «Уфа»
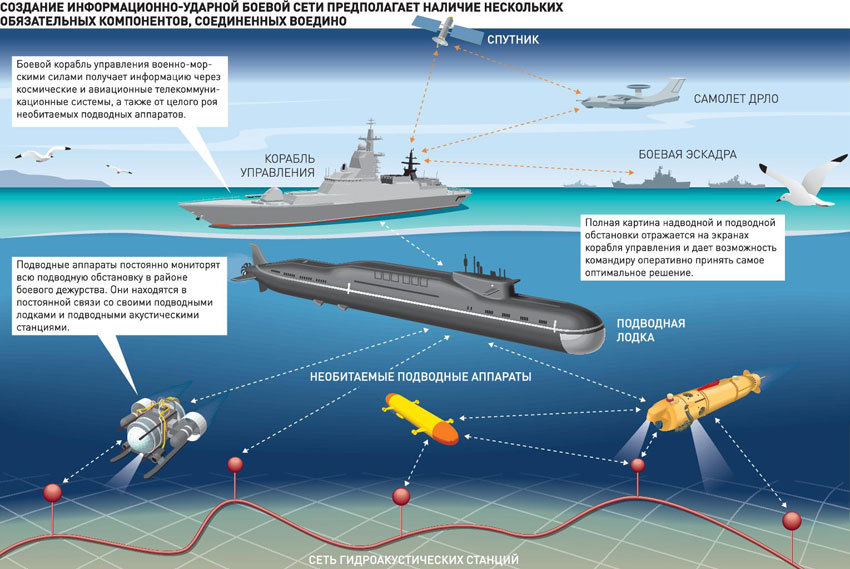
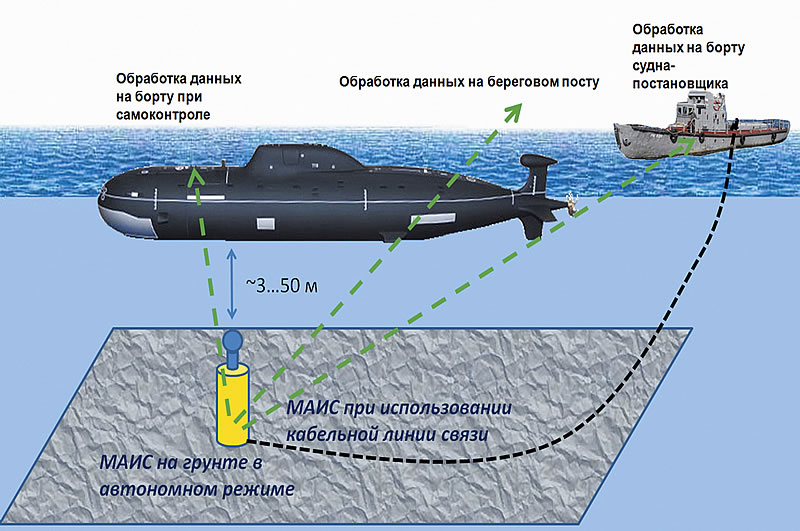
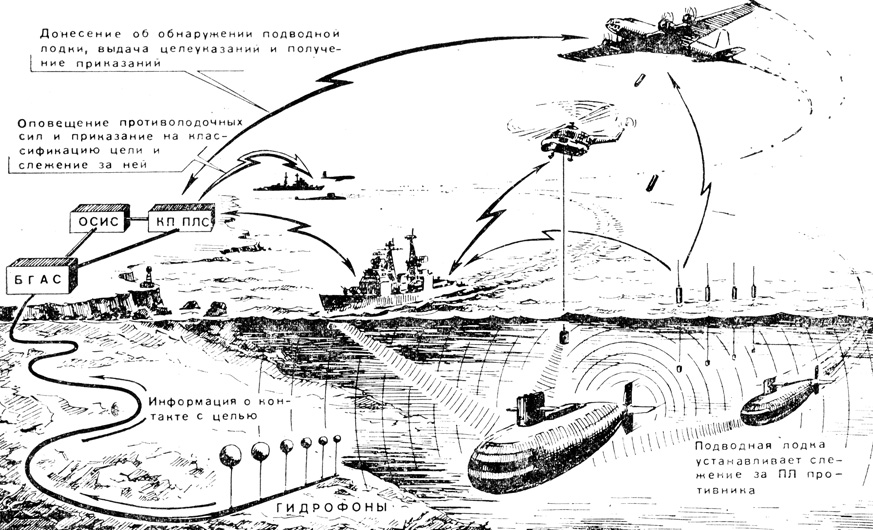
Донные системы освещения подводной обстановки в наше время
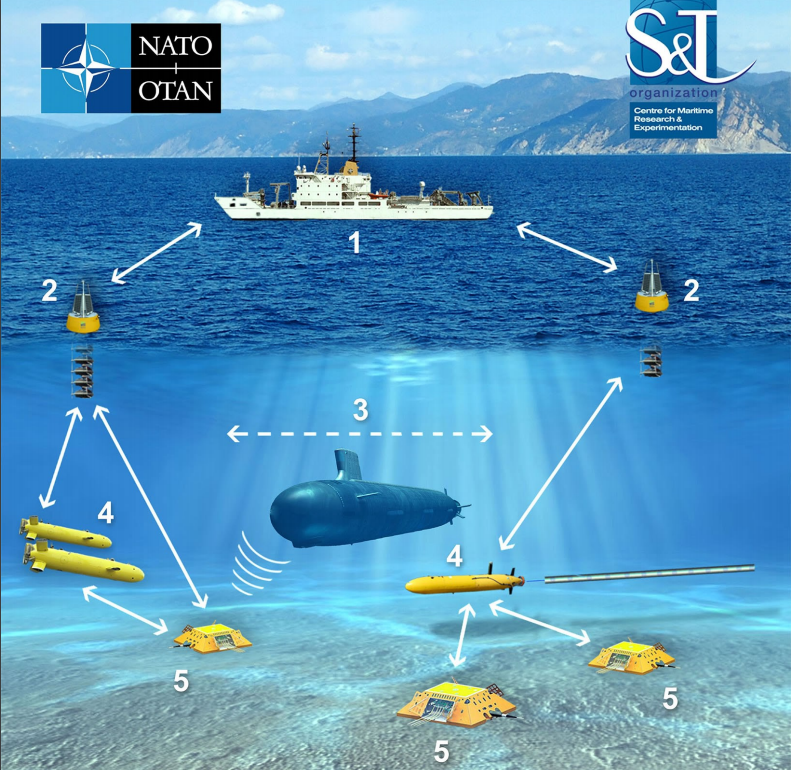
Речь идет о быстроразвертываемых (с ПЛ и самолетов) системах. Ключевой их проблемой в прошлом была классификация. В SOSUS задача решалась на берегу, что требовало дорогостоящих высокотехнологичных кабелей от антенн до береговых центров.
Примером автономного выставляемого обнаружителя является наш буй МГС-407. Однако обнаружение целей производилось в диапазоне средних частот, а классификация была самая примитивная – по превышению порогового уровня. Соответственно дальности обнаружения таких буев были очень малы.
Использование низких частот (и ДС «портрета цели») приводило не только к резкому увеличению стоимости, но и необходимости загрузки фактически секретных разведданных, что при условии выставления их в водах противника было прямой предпосылкой для их раскрытия противнику.
Переход с пассивного обнаружения на «подсвет» позволил решить эту проблему. В «мозг» выставляемого буя загружается минимальная информация, обеспечивающая только работу (синхронизацию) с «подсветом».
Таким образом, противник получил возможность развертывания стационарной сети обнаружения вблизи наших баз. И, более того – интегрирования их развернутыми там же минами (пример – Hammerhead не убийца «Посейдонов», он убийца их носителей).
Таковы составляющие системы противолодочной борьбы на ТВД, организованной по американским стандартам. Будь у нас конфликт отдельно с Японией или Турцией, США, даже не участвуя в войне против нас напрямую (как, скорее всего, и будет), обеспечат любого нашего противника всей имеющейся информацией о подводной обстановке на ТВД. А где-то и лодку «втихую» потопят, если потом всё можно будет отрицать.
Стоит рассмотреть реальный и свежий пример того, как это работает.
Немецкие СДВ-радиостанции
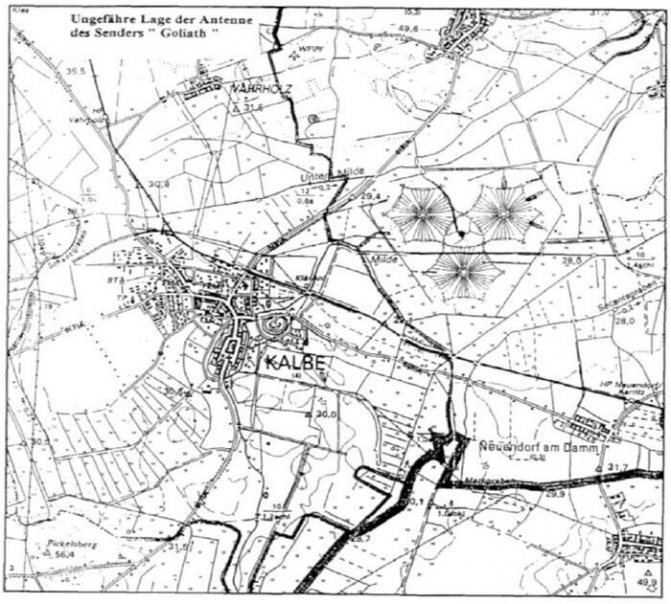
0 К началу войны в распоряжении кригсмарине уже имелись СДВ-радиостанции, самой мощной из которых была «Науэн» (Nauen), находившаяся в одноименном районе в Бранденбурге. Однако она уже тогда считалась устаревшей и по своим показателям не устраивала немецкий флот, а модернизировать её не представлялось возможным: для постройки нового сверхдлинноволнового передатчика требовалась бы дополнительная территория площадью минимум три квадратных километра. На этом месте, кроме СДВ-станции, уже находились и коротковолновые передатчики со своими антеннами, и возможности для монтирования новых крупных конструкций попросту не было. В 1941 году неподалёку от городка Кальбе (Kalbe) в Саксонии было начато строительство нового сверхдлинноволнового передатчика, который по своей мощности и производительности должен был наголову превзойти всех своих предшественников и потому получил название «Голиаф».
Рекомендации
- Карлос А. Альтгейт (20 октября 2005 г.). «Самая большая в мире» радиостанция » (PDF). Получено 1 сентября 2013.
- «Место установки сверхнизкочастотного передатчика в Клэм-Лейк, Висконсин» (PDF). ВМС США. 8 апреля 2003 г.. Получено 5 мая 2017.
- ^ аб Тронд Якобсен. «ЗЕВС, российский передатчик КНЧ 82 Гц».
- https://www.thedrive.com/the-war-zone/25728/chinas-new-york-city-sized-earthquake-warning-system-sounds-more-like-way-to-talk-to-subs
- «Военно-морской флот получил новый объект для связи с подводными атомными подводными лодками». Таймс оф Индия . 31 июля 2014 г.
- https://www.janes.com/article/11147/india-makes-headway-with-elf-site-construction
- «Индия станет второй страной, использующей оборудование ELF». Индуистский . Специальный корреспондент. 20 мая 2022. ISSN 0971-751X. Получено 14 декабря 2022.CS1 maint: другие (связь)
- https://www.thedrive.com/the-war-zone/25728/chinas-new-york-city-sized-earthquake-warning-system-sounds-more-like-way-to-talk-to-subs
- Фридман, Норман (1997). Справочник Военно-морского института по мировым системам военно-морского вооружения, 1997–1998 гг. . Нью-Йорк: Издательство военно-морского института. С. 41–42. ISBN 1-55750-268-4 — через Google Книги.
- Франческо Тонолини и Фадель Адиб. «TARF, беспроводная связь из подводного мира в воздух».
- Майкл Козиол. «Исследователи TARF, Массачусетского технологического института разработали бесшовную систему подводной связи».
- «Новая эра цифровых подводных коммуникаций». НАТО. 27 апреля 2017.
- «Вики сообщества JANUS».
- Браун, Эрик (15 августа 2022 г.). «Интернет подводных вещей: стандарт JANUS с открытым исходным кодом для подводных коммуникаций». Linux.com . Фонд Linux.
- Насини, Франческа (4 мая 2022 г.). «JANUS создает новую эру цифровых подводных коммуникаций». Робохаб .
Как работает радио связь между подводными лодками:
Распространение радио волн осуществляется по такому принципу: тот, кто передает сигнал, с определенной частотой и мощностью, устанавливает радиоволну. После чего, отосланный сигнал модулирует на высокочастотное колебание. Подхваченный модулированный сигнал исходит специальной антенной на определенные расстояния. Там где получают сигнал радиоволны, к антенне устремляют модулированный сигнал, который сначала отфильтровывается и демодулируется. И только потом мы можем получить сигнал, с некой различаемостью с сигналом, тем, что был передан изначально.
Радиоволны с самым низким диапазоном (ОНЧ, VLF, 3—30 кГц) без проблем пробиваются сквозь морскую воду, до 20 метровой глубины.
Например, подводная лодка, которая находится не так уж глубоко под водой, смогла бы применить этот диапазон для установки и поддержания связи с экипажем. А если мы возьмем подводную лодку, но находящуюся на много глубже под водой, и у нее будет длинный кабель, на котором прикреплен буй с антенной, то она тоже сможет использовать этот диапазон. За счет того что буй установлен на глубине нескольких метров, да еще и имеет маленькие габариты, его очень проблематично отыскать сонарами врагов. «Голиаф», является одним из первых ОНЧ-передатчиков, сооруженный во времена Второй Мировой (1943 г.) в Германии, после окончания войны был переправлен в СССР, а в 1949—1952 годах реанимирован в Нижегородской области и используется там по сей день.
Аэрофотография КНЧ-передатчика (Клэм Лэйк, Висконсин, 1982)
Радиоволны самой низкой частоты (КНЧ, ELF, до 3 кГц) с легкостью проникают сквозь Земную кору и моря. Создание КНЧ-передатчика — из-за громадной длинны волн, ужасно трудная задача.К примеру советская система «ЗЕВС» вырабатывает частоту 82 Гц (длина волны — 3658,5 км) ,а американская «Seafarer» — 76 Гц (длина волны — 3947,4 км) . Их волны соизмеримыс радиусом Земли. От сюда мы видим, что возведение дипольной антенны в половину длины волны (протяжённостью ≈ 2000 км) — недостижимая на текущем этапе цель.

Подводя итоги всему, что было сказано выше, нам необходимо отыскать такую часть земной поверхности, которая будет характеризоваться относительно низкой проводимостью, и присоединить к ней 2 гигантских электрода, которые бы располагались на расстоянии 60 километров относительно друг друга.
Так как нам известна удельная проводимость Земли по части электродов удовлетворительно находится на низком уровне, таким образом, электрический ток между электродами проникал бы фундаментально в глубь недров нашей планеты, применяя их как элемент гигантской антенны. Нужно заметить, что первоисточником необыкновенно высочайших технических трудностей такой антенны, лишь у СССР и США числились КНЧ-передатчики.
Скрытность
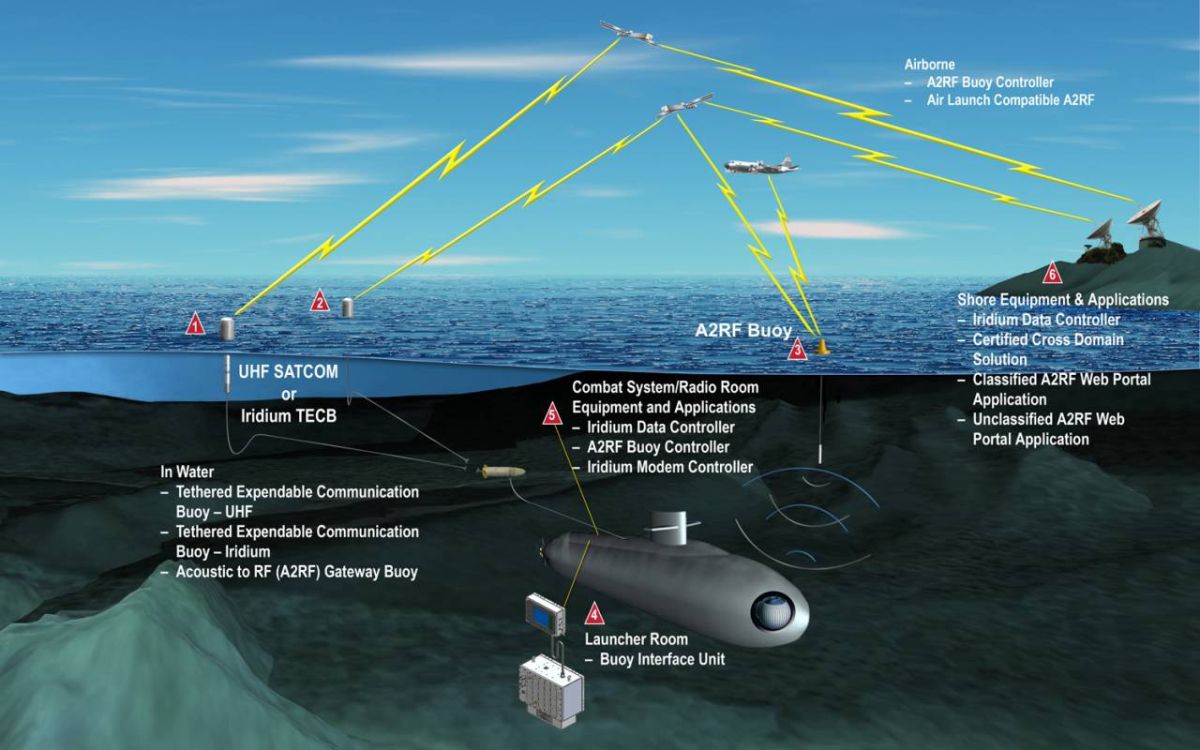
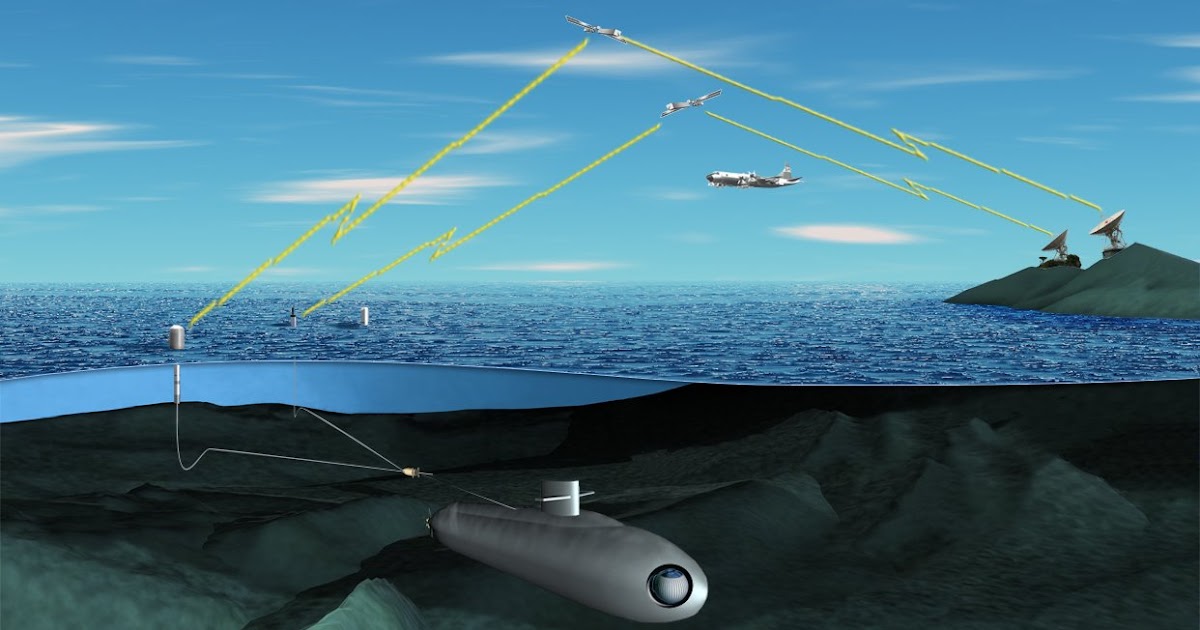
Сеансы связи, особенно со всплытием лодки, нарушают её скрытность, подвергая риску обнаружения и атаки. Поэтому принимаются различные меры, повышающие скрытность лодки, как технического, так и организационного порядка. Так, лодки используют передатчики для передачи коротких импульсов, в которых сжата вся необходимая информация. Также передача может быть осуществлена всплывающим и подвсплывающим буём. Буй может быть оставлен лодкой в определённом месте для передачи данных, которая начинается, когда сама лодка уже покинула район, или нет.
Радио — это один из видов беспроводной связи, в нем носителем сигнала является радиоволна, которая широко распространяется на расстоянии. Есть мнение, что нельзя передавать радиосигналы под водой. Попробуем разобраться, почему нельзя осуществлять радиосвязь между подводными лодками,
и так ли это на самом деле.
Борьба за живучесть
При крушении наводного судна шанс на спасение достаточно высок. Для этих целей предусмотрены спасательные жилеты, плоты и шлюпки. К тому же, поданный сигнал SOS смогут зафиксировать как на берегу, так и на проходящем по близости судне. Единственное ограничение при спасении с тонущего корабля распростятся на капитана — он должен покинуть судно последним, убедившись, что на борту не осталось пассажиров и членов экипажа. Совершенно иначе дела обстоят на терпящей бедствие подводной лодке.
Известная фраза «Куда ты денешься с подводной лодки?» как нельзя лучше описывает поведение экипажа в любой нештатной ситуации. О личном спасении не может идти и речи — выживание экипажа напрямую связано с выживанием самой субмарины. Статья 23 «Руководства по борьбе за живучесть подводной лодки» содержит следующую формулировку: «Никто не имеет права самостоятельно покинуть аварийный отсек. Вывод личного состава из аварийного отсека осуществляется только по приказанию центрального поста в указанный им отсек». Иными словами, без прямого приказа капитана подводникам запрещается покидать отсек, какая бы опасность им там ни угрожала.
В этом свете весьма показательна судьба экипажа подводной лодки К-56, которая в ночь на 14 июня 1973 года столкнулась с судном «Академик Берг» в одном из заливов Японского моря. Субмарина получила пробоину между первым и вторым отсеком, которые начали стремительно заполняться водой. Тогда руководство приняло действительно тяжелое решение, приказав задраить переборку между вторым и третьим отсеком. Часть команды оказалась обречена на гибель, однако это помогло остальному экипажу выиграть время для борьбы за живучесть корабля.
В итоге субмарину удалось посадить на мель и большая часть экипажа спаслась. Удалось выжить даже тем, кто оказался задраенным в первом отсеке. Стоя по грудь в холодной воде, подводники до конца сохраняли самообладание, пока не ощутили спасительный удар о грунт.
Спутники
Если субмарина находится в надводном положении, то она может использовать обычный диапазон радиосвязи, как и прочие морские суда. Это не означает использование обычного коротковолнового диапазона: чаще всего это связь с военным для использования их в качестве ретрансляторов сигнала и обеспечения связи кораблей из любой точки мира с командованием ВМФ. По проекту было модифицировано три субмарины.
Аналогичное оборудование установлено на воздушном командном пункте — самолёте Ил-80 .
В ВМС США для связи с ПЛ в СДВ диапазоне используется самолёт E-6 Mercury (созданный на базе пассажирского Боинга-707, используются буксируемые антенны длиной 7925 м (основная) и 1219 м (вспомогательная)). Собственно, этот самолёт не является чистым ретранслятором сигналов боевого управления для ПЛАРБ, а служит командным пунктом для управления стратегическими ядерными силами. В состав экипажа, помимо 5 человек, непосредственно управляющих машиной, ещё входит 17 операторов. Правительственный воздушный командный пункт E-4A (на базе Боинга-747) также имеет станцию СДВ и буксируемую трос-антенну длиной около 8 км.



